Adaptive Model Predictive Control With Data Driven Error Model For Quadrupedal Locomotion Cuhk

Figure 4 From Data-Driven Model-Free Adaptive Predictive Control And Its Stability Analysis ...
Figure 4 From Data-Driven Model-Free Adaptive Predictive Control And Its Stability Analysis ... Model predictive control (mpc) relies heavily on the robot model for its control law. however, a gap always exists between the reduced order control model with. We propose a novel control framework for quadruped robots where the data driven error model is combined with mpc. it can help the controller to have a better estimate of future robot states even under mpc with a defect model, then adjust desired inputs for the robot.

Adaptive Complexity Model Predictive Control | DeepAI
Adaptive Complexity Model Predictive Control | DeepAI Your tasks in this thesis, you will develop a forward backward adaptive control method to address the elastic payload problem in quadrupedal robots:. To address this issue, we propose the controller of integrating a data driven error model into traditional mpc for quadruped robots. our approach leverages real world data from sensors to compensate for defects in the control model. Adaptive model predictive control with data driven error model for quadrupedal locomotion sirius legged cuhk robot 94 subscribers subscribed. To achieve better control performance, a deep learning model, the gru arx model, is constructed by employing the data driven modeling technology, which can be viewed as a linear model at each operating point, while being depicted as a nonlinear model globally.

Figure 1 From Adaptive Model Predictive Control With Data-driven Error Model For Quadrupedal ...
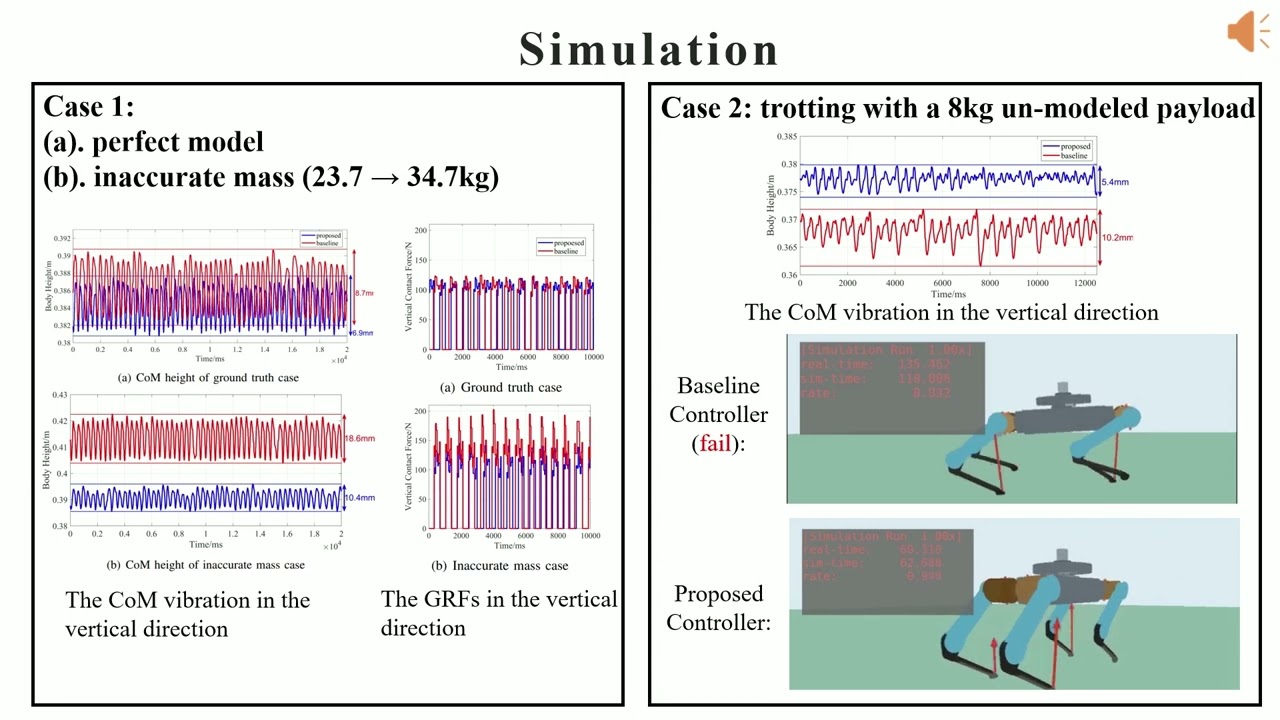
Figure 1 From Adaptive Model Predictive Control With Data-driven Error Model For Quadrupedal ... Adaptive model predictive control with data driven error model for quadrupedal locomotion sirius legged cuhk robot 94 subscribers subscribed. To achieve better control performance, a deep learning model, the gru arx model, is constructed by employing the data driven modeling technology, which can be viewed as a linear model at each operating point, while being depicted as a nonlinear model globally. In this paper, the locomotion and steering control of a simulated mini cheetah quadruped robot was investigated in the presence of terrain characterised by low friction. This dissertation contributes to the advancement of adaptive motion planning and control solutions that enable quadrupedal robots to traverse unknown rough environments while tasked with transporting unknown payloads. Model predictive control is a popular advanced control strategy, but its performance is largely limited by the accuracy of the predictive model, the learning ab. This paper presents an adaptive model predictive control (ampc) approach with a data driven error model for quadrupedal locomotion. the proposed method aims to handle model uncertainties and disturbances by adaptively updating the control parameters based on a data driven error model.

Figure 1 From A Data-Driven Model-Reference Adaptive Control Approach Based On Reinforcement ...
Figure 1 From A Data-Driven Model-Reference Adaptive Control Approach Based On Reinforcement ... In this paper, the locomotion and steering control of a simulated mini cheetah quadruped robot was investigated in the presence of terrain characterised by low friction. This dissertation contributes to the advancement of adaptive motion planning and control solutions that enable quadrupedal robots to traverse unknown rough environments while tasked with transporting unknown payloads. Model predictive control is a popular advanced control strategy, but its performance is largely limited by the accuracy of the predictive model, the learning ab. This paper presents an adaptive model predictive control (ampc) approach with a data driven error model for quadrupedal locomotion. the proposed method aims to handle model uncertainties and disturbances by adaptively updating the control parameters based on a data driven error model.

Figure 3 From Adaptive Model Predictive Control With Data-driven Error Model For Quadrupedal ...
Figure 3 From Adaptive Model Predictive Control With Data-driven Error Model For Quadrupedal ... Model predictive control is a popular advanced control strategy, but its performance is largely limited by the accuracy of the predictive model, the learning ab. This paper presents an adaptive model predictive control (ampc) approach with a data driven error model for quadrupedal locomotion. the proposed method aims to handle model uncertainties and disturbances by adaptively updating the control parameters based on a data driven error model.
Adaptive Model Predictive Control with Data-driven Error Model for Quadrupedal Locomotion
Adaptive Model Predictive Control with Data-driven Error Model for Quadrupedal Locomotion
Related image with adaptive model predictive control with data driven error model for quadrupedal locomotion cuhk





 A Data-Driven Model-Reference Adaptive Control Approach Based On Reinforcement Learning")



 Adaptive Data-Driven Predictive Control As A Module In Building Control Hierarchy: A Case ...")

 Adaptive Model Predictive Control Based On Fixed Point Iteration | Imre Rudas - Academia.edu")
Related image with adaptive model predictive control with data driven error model for quadrupedal locomotion cuhk




About "Adaptive Model Predictive Control With Data Driven Error Model For Quadrupedal Locomotion Cuhk"
Comments are closed.