Autonomous Missions W Ardupilot In Mission Planner And Qgroundcontrol

Mission Planner Autonomous Flight - ArduCopter - ArduPilot Discourse
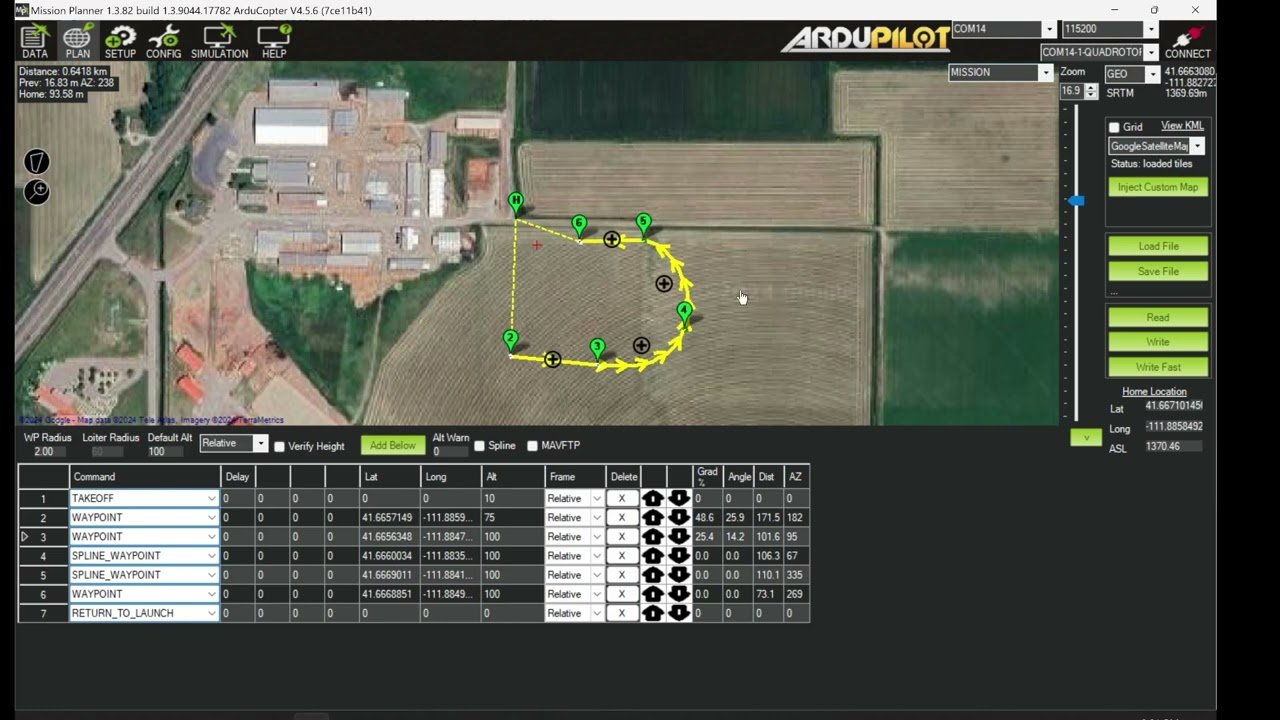
Mission Planner Autonomous Flight - ArduCopter - ArduPilot Discourse No description has been added to this video. The instructions focus on the mission planner but the main concepts apply to other ground control stations as well. questions, issues, and suggestions about this page can be raised on the forums. issues and suggestions may be posted on the forums or the github issue tracker.

Online Course: Introduction To ArduCopter Auto Missions With Mission Planner | SIMNET
Online Course: Introduction To ArduCopter Auto Missions With Mission Planner | SIMNET Ardusimple explains how to set up missionplanner and qgroundcontrol for transmitting rtk base station corrections to an autopilot for drones and robotics. the steps have been validated with simplertk2b, simplertk2blite, and simplertk3b gnss receivers. The plan view is used to plan autonomous missions for your vehicle, and upload them to the vehicle. once the mission is planned and sent to the vehicle, you switch to the fly view to fly the mission. Mp and qgc will both connect to the drone. both will allow you to control the drone. both will let you plan missions. arguably qgc is easier to plan missions in, but mp will give you more options, so that one will depend on what you want to do. qgc does not let you view data flash logs. This tutorial covers how to configure missionplanner and qgroundcontrol to send rtk base station corrections to the autopilot. the instructions have been tested with simplertk2b, simplertk2blite and simplertk3b gnss receivers.

Mission Planner Mission Behaviour - ArduCopter - ArduPilot Discourse
Mission Planner Mission Behaviour - ArduCopter - ArduPilot Discourse Mp and qgc will both connect to the drone. both will allow you to control the drone. both will let you plan missions. arguably qgc is easier to plan missions in, but mp will give you more options, so that one will depend on what you want to do. qgc does not let you view data flash logs. This tutorial covers how to configure missionplanner and qgroundcontrol to send rtk base station corrections to the autopilot. the instructions have been tested with simplertk2b, simplertk2blite and simplertk3b gnss receivers. Gcs designed to streamline the planning of complex missions that include area scanning, taking photos, & videos. it provides a 3d view mode, binding of physical structures and an in built simulator that helps to better visualize planned missions. Qgroundcontrol provides full flight control and vehicle setup for px4 or ardupilot powered vehicles. it provides easy and straightforward usage for beginners, while still delivering high end feature support for experienced users. Presently i use missions provided by a colleague who uses mission planner. the include screen shot shows my dilemma, the plane is sent out of bounds and lands across the runway! how do i fix this problem? qgc sets up an approach path for a landing. it basically creates two waypoints. In this blog post, we'll provide a comparative analysis of five popular uav ground control stations : mission planner, qgroundcontrol, ugcs, betaflight, and inav, discussing their pros and cons and which types of uavs they are better suited for.

Autonomous Mission Problem - QGroundControl - ArduPilot Discourse
Autonomous Mission Problem - QGroundControl - ArduPilot Discourse Gcs designed to streamline the planning of complex missions that include area scanning, taking photos, & videos. it provides a 3d view mode, binding of physical structures and an in built simulator that helps to better visualize planned missions. Qgroundcontrol provides full flight control and vehicle setup for px4 or ardupilot powered vehicles. it provides easy and straightforward usage for beginners, while still delivering high end feature support for experienced users. Presently i use missions provided by a colleague who uses mission planner. the include screen shot shows my dilemma, the plane is sent out of bounds and lands across the runway! how do i fix this problem? qgc sets up an approach path for a landing. it basically creates two waypoints. In this blog post, we'll provide a comparative analysis of five popular uav ground control stations : mission planner, qgroundcontrol, ugcs, betaflight, and inav, discussing their pros and cons and which types of uavs they are better suited for.
Autonomous Missions w/Ardupilot in Mission Planner and QGroundControl
Autonomous Missions w/Ardupilot in Mission Planner and QGroundControl
Related image with autonomous missions w ardupilot in mission planner and qgroundcontrol











 - Ardupilot-mission-planner")
Related image with autonomous missions w ardupilot in mission planner and qgroundcontrol


")

About "Autonomous Missions W Ardupilot In Mission Planner And Qgroundcontrol"
Comments are closed.