
Robot Kinematics | PDF | Cartesian Coordinate System | Angle
Robot Kinematics | PDF | Cartesian Coordinate System | Angle Ch 2 robot mechanisms free download as powerpoint presentation (.ppt / .pptx), pdf file (.pdf), text file (.txt) or view presentation slides online. this document discusses robot kinematics and mechanisms. Figures 3.1.2 ~ 4 show three types of robot arm structures corresponding to the cartesian coordinate system, the cylindrical coordinate system, and the spherical coordinate system respectively.

Lecture 2 - Kinematics Of Mechanisms 2 | PDF | Rotation Around A Fixed Axis | Velocity
Lecture 2 - Kinematics Of Mechanisms 2 | PDF | Rotation Around A Fixed Axis | Velocity If the coordinates of any point in an orthogonal coordinate system is given, coordinates of this point in another orthogonal coordinate system can be by homogeneous coordinate transformation. There are two classes of robot geometries for which closed form inverse kinematic solutions are guaranteed. they are: any 2 transl. joints normal to a rot. joint. v.d. tourassis and m.h. ang jr., “task decoupling in robot manipulators,” journal of intelligent and robotic systems 14:283 302, 1995. In order to control and programme a robot we must have knowledge of both its spatial arrangement and a means of reference to the environment. In summary, the hartenberg method is a powerful tool for modeling the kinematics of robotic manipulators, and it is widely used in robot dynamics research and development.

Kinematics Of Robotics | PDF | Rotation | Kinematics
Kinematics Of Robotics | PDF | Rotation | Kinematics In order to control and programme a robot we must have knowledge of both its spatial arrangement and a means of reference to the environment. In summary, the hartenberg method is a powerful tool for modeling the kinematics of robotic manipulators, and it is widely used in robot dynamics research and development. In the following, we will first discuss the basics of kinematics by describing the motion of points and single bodies before moving on to serial systems of bodies in section 2.8. Chapter2.pdf free download as pdf file (.pdf), text file (.txt) or view presentation slides online. the document discusses kinematics and homogeneous coordinate transformations for robotics. Analytical study of the geometry of the arm motion, with respect to a steady cartesian reference frame, without considering forces and torques which generate motion (actuation, inertia, friction, gravity, etc.). In order to control and programme a robot we must have knowledge of both its spatial arrangement and a means of reference to the environment. mechanics of a manipulator can be represented as a kinematic chain of rigid bodies (links) connected by revolute or prismatic joints.
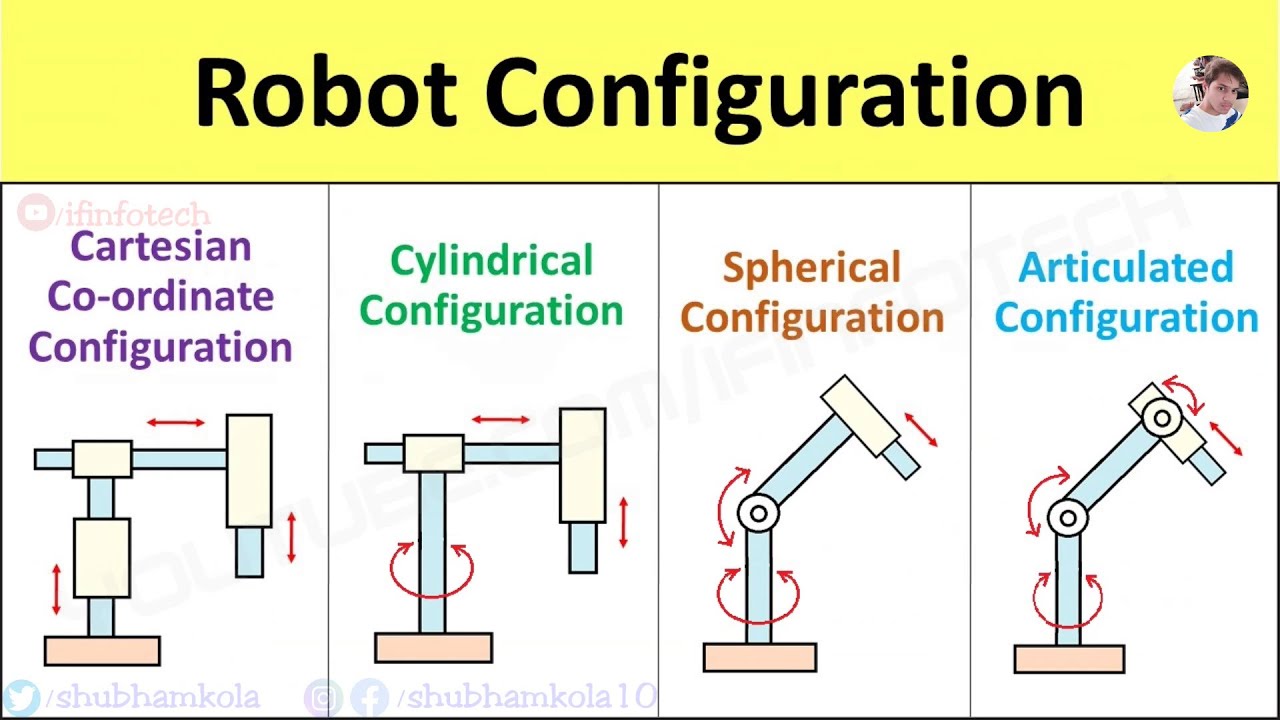
Types of Robot Configuration: Cartesian Coordinate, Cylindrical, Articulated, Spherical, SCARA
Types of Robot Configuration: Cartesian Coordinate, Cylindrical, Articulated, Spherical, SCARA
Related image with ch 2 robot mechanisms pdf kinematics cartesian coordinate system



 ROBOT KINEMATICS")








Related image with ch 2 robot mechanisms pdf kinematics cartesian coordinate system



")
About "Ch 2 Robot Mechanisms Pdf Kinematics Cartesian Coordinate System"
Comments are closed.