
Data-Driven Control: Balancing Example | Resourcium
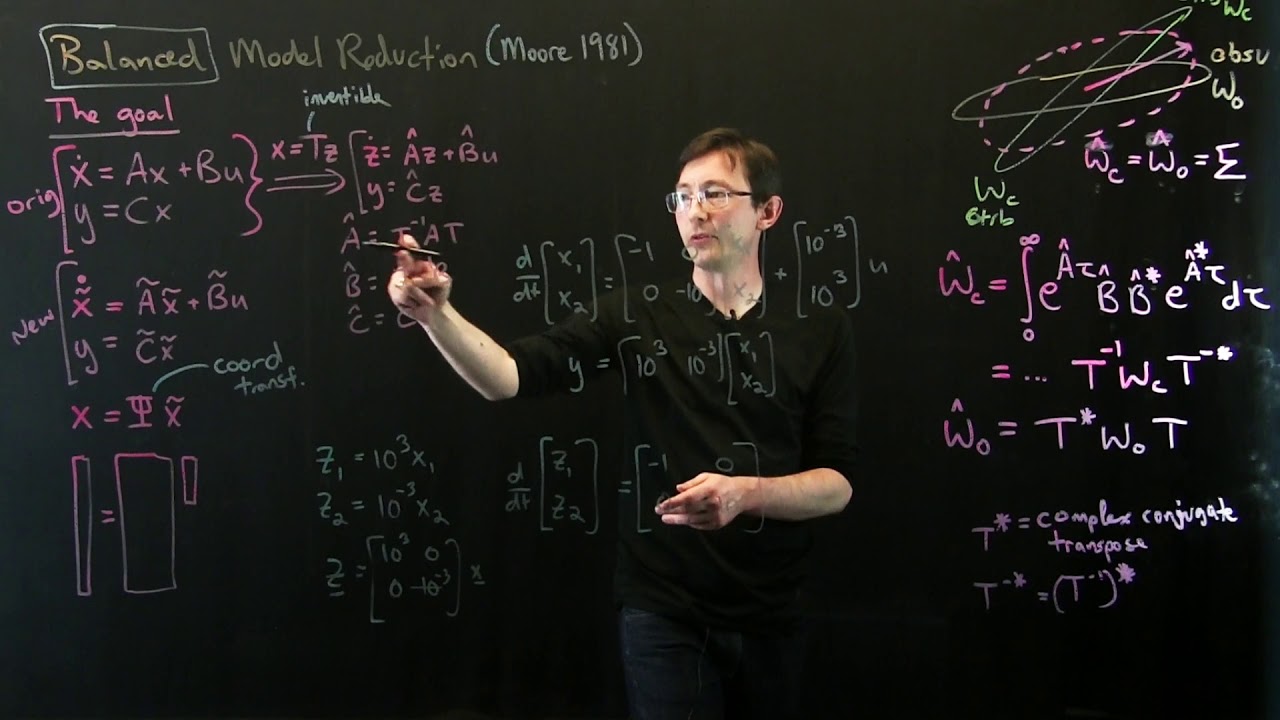
Data-Driven Control: Balancing Example | Resourcium In this lecture, we give an example of how a change of coordinates can balance the controllability and observability of an input—output system. In this lecture, we give an example of how a change of coordinates can balance the controllability and observability of an input—output system.

Data-Driven Control: Balancing Transformation | Resourcium
Data-Driven Control: Balancing Transformation | Resourcium It touches on some data driven control methods, but these will be explored in more depth in the reinforcement learning chapter. everything here is brief since i’m not an expert in these techniques. Data driven control systems are a broad family of control systems, in which the identification of the process model and/or the design of the controller are based entirely on experimental data collected from the plant. In this lecture, we introduce the eigensystem realization algorithm (era), which is a purely data driven algorithm to obtain balanced input—output models from impulse response data. In this lecture, we explore the balanced truncation procedure on an example in matlab. in particular, we demonstrate the ability of a balancing transformation to make the controllability and observability gramians equal and diagonal.

Data Driven Control | PDF | Machine Learning | Artificial Intelligence
Data Driven Control | PDF | Machine Learning | Artificial Intelligence In this lecture, we introduce the eigensystem realization algorithm (era), which is a purely data driven algorithm to obtain balanced input—output models from impulse response data. In this lecture, we explore the balanced truncation procedure on an example in matlab. in particular, we demonstrate the ability of a balancing transformation to make the controllability and observability gramians equal and diagonal. Overview lecture for series on data driven control. in this lecture, we discuss how machine learning optimization can be used to discover models and effective controllers directly from data. This paper provides a critical review of data driven optimization, control, and decision making in these application areas within distribution networks, identifies possibilities to improve and enable dsos, highlights current theory practice gaps, and lists open research questions. This paper investigates the practical application of data driven control by comparing it with traditional model based control methods on a real balancing robot, the pololu balboa 32u4. We present three data driven approaches based on the notion of control as interconnection. in the first approach, we use both the data and representations to compute control variable trajectories that impose a prescribed path on the to be controlled variables.

Data-Driven Control: Overview | Resourcium
Data-Driven Control: Overview | Resourcium Overview lecture for series on data driven control. in this lecture, we discuss how machine learning optimization can be used to discover models and effective controllers directly from data. This paper provides a critical review of data driven optimization, control, and decision making in these application areas within distribution networks, identifies possibilities to improve and enable dsos, highlights current theory practice gaps, and lists open research questions. This paper investigates the practical application of data driven control by comparing it with traditional model based control methods on a real balancing robot, the pololu balboa 32u4. We present three data driven approaches based on the notion of control as interconnection. in the first approach, we use both the data and representations to compute control variable trajectories that impose a prescribed path on the to be controlled variables.

Data Driven Control | PDF | Computer Simulation | Control Theory
Data Driven Control | PDF | Computer Simulation | Control Theory This paper investigates the practical application of data driven control by comparing it with traditional model based control methods on a real balancing robot, the pololu balboa 32u4. We present three data driven approaches based on the notion of control as interconnection. in the first approach, we use both the data and representations to compute control variable trajectories that impose a prescribed path on the to be controlled variables.
Data-Driven Control: Balancing Example
Data-Driven Control: Balancing Example
Related image with data driven control balancing example resourcium












Related image with data driven control balancing example resourcium




About "Data Driven Control Balancing Example Resourcium"
Comments are closed.