
Realization Of Control Algorithm For Electro-Hydraulic Power Steering | PDF | Steering ...
Realization Of Control Algorithm For Electro-Hydraulic Power Steering | PDF | Steering ... In this lecture, we describe the eigensystem realization algorithm (era) in detail, including step by step algorithmic instructions.https://www.eigensteve.co. In this lecture, we describe the eigensystem realization algorithm (era) in detail, including step by step algorithmic instructions.

Data Driven Control | PDF | Machine Learning | Artificial Intelligence
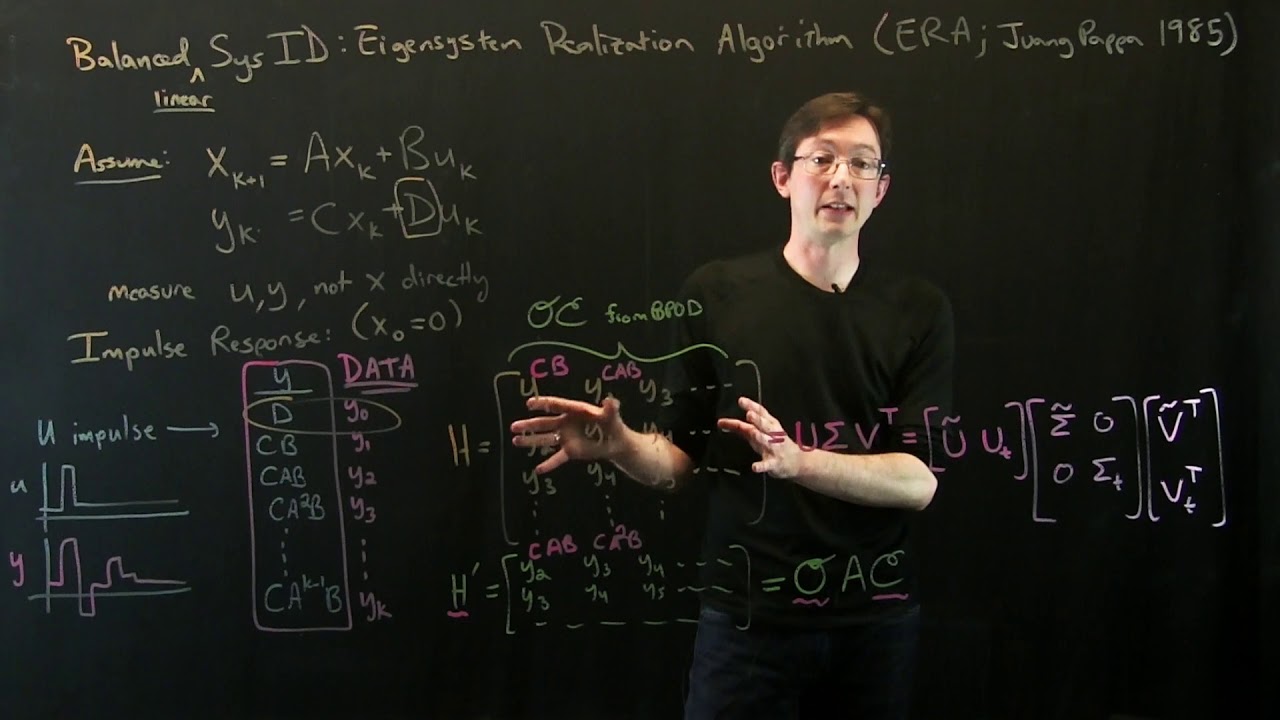
Data Driven Control | PDF | Machine Learning | Artificial Intelligence In part of the series, professor brunton explains the eigensystem realisation algorithm (era) ( juang & pappa, 1985 ) . the era is a procedure by which a reduced order model for a linear and time invariant system (lti) can be derived from data of an impulse response measurement. This library provides a python implementation of the eigensystem realization algorithm (era), a data driven system identification method used to derive state space models from input output data. Abstract measurement data, prony analysis, matrix pencil (mp), and eigensystem realiza tion algorithm (era) are three major methods. this paper reviews the three methods and sheds insight on the principles of the three methods: eigenvalue identification through vario. Usually, this is an iterative procedure where the analyst performs the identification with a set of parameters, analyzes the output of this process and changes the parameters depending on the results obtained.

Data Driven Control | PDF | Computer Simulation | Control Theory
Data Driven Control | PDF | Computer Simulation | Control Theory Abstract measurement data, prony analysis, matrix pencil (mp), and eigensystem realiza tion algorithm (era) are three major methods. this paper reviews the three methods and sheds insight on the principles of the three methods: eigenvalue identification through vario. Usually, this is an iterative procedure where the analyst performs the identification with a set of parameters, analyzes the output of this process and changes the parameters depending on the results obtained. Many algorithms have been established, some of them deterministic in nature, i.e. without considering noise in the measured data, and others stochastic, i.e. with formulations minimizing the noise uncertainty in the identification. during the 90s, building upon initial work by gilbert and kalman, several methods have been developed to identify. This paper has described the data driven control of a two tank process, showcasing an innovative combination of the eigensystem realization algorithm (era), tube mpc, and a proportional integral kalman filter (pikf). Venting analytical implementation of bt. we investigate the performance of roms in prediction of dynamics with unseen forcing inputs and demonstrate stability and accuracy of balanced roms in truly predictive scenarios whereas without era, pod galerkin and least squares petrov galerkin project. The problem of minimal system realization is as follows; given the functions y(k) from measurements, construct a set of constant matrices [a, b, c] in terms of y(k) such that the identities of eq. (3) hold and the order of a is minimum.

Data-Driven Control: Eigensystem Realization Algorithm Procedure | Resourcium
Data-Driven Control: Eigensystem Realization Algorithm Procedure | Resourcium Many algorithms have been established, some of them deterministic in nature, i.e. without considering noise in the measured data, and others stochastic, i.e. with formulations minimizing the noise uncertainty in the identification. during the 90s, building upon initial work by gilbert and kalman, several methods have been developed to identify. This paper has described the data driven control of a two tank process, showcasing an innovative combination of the eigensystem realization algorithm (era), tube mpc, and a proportional integral kalman filter (pikf). Venting analytical implementation of bt. we investigate the performance of roms in prediction of dynamics with unseen forcing inputs and demonstrate stability and accuracy of balanced roms in truly predictive scenarios whereas without era, pod galerkin and least squares petrov galerkin project. The problem of minimal system realization is as follows; given the functions y(k) from measurements, construct a set of constant matrices [a, b, c] in terms of y(k) such that the identities of eq. (3) hold and the order of a is minimum.
Data-Driven Control: Eigensystem Realization Algorithm Procedure
Data-Driven Control: Eigensystem Realization Algorithm Procedure
Related image with data driven control eigensystem realization algorithm procedure












Related image with data driven control eigensystem realization algorithm procedure




About "Data Driven Control Eigensystem Realization Algorithm Procedure"
Comments are closed.