
Data-Driven Control Of The Chemostat Using The Koopman Operator Theory"
Data-Driven Control Of The Chemostat Using The Koopman Operator Theory" This approach is data driven, yet yields an explicit control oriented model rather than just a “black box” input–output mapping. this work describes a koopman based system identification method and its application to model predictive control (mpc) design for soft robots. This work describes a koopman based system identification method and its application to model predictive control (mpc) design for soft robots.
 Data-Driven Control Of Soft Robots Using Koopman Operator Theory")
(PDF) Data-Driven Control Of Soft Robots Using Koopman Operator Theory
(PDF) Data-Driven Control Of Soft Robots Using Koopman Operator Theory In this framework, three data driven models are proposed and identified to approximate the infinite dimensional linear koopman operator through a method called extended dynamic mode decomposition (edmd). Koop man operator theory offers a way to construct explicit linear dynamical models of soft robots and to control them using established model based linear control methods. Supplemental code for "data driven control of soft robots using koopman operator theory," by daniel bruder, xun fu, r. brent gillespie, c. david remy, and ram vasudevan. Koopman operator theory offers a way to construct explicit dynamical models of soft robots and to control them using established model based control methods. this approach is data driven, yet yields an explicit control oriented model rather than just a “black box” input–output mapping.

Modeling And Control Of Soft Robots Using The Koopman Operator And Model Predictive Control | DeepAI
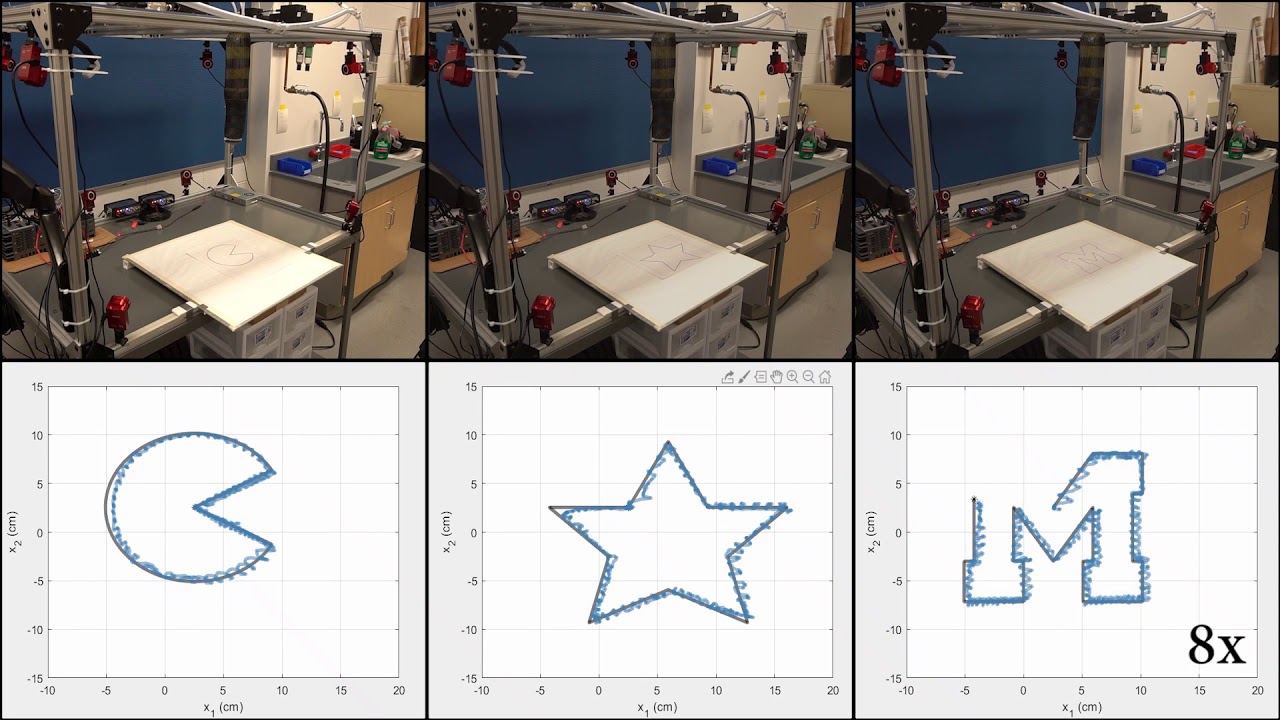
Modeling And Control Of Soft Robots Using The Koopman Operator And Model Predictive Control | DeepAI Supplemental code for "data driven control of soft robots using koopman operator theory," by daniel bruder, xun fu, r. brent gillespie, c. david remy, and ram vasudevan. Koopman operator theory offers a way to construct explicit dynamical models of soft robots and to control them using established model based control methods. this approach is data driven, yet yields an explicit control oriented model rather than just a “black box” input–output mapping. Currently, researchers have proposed a data driven model predictive control (mpc) approach based on the koopman operator, known as kmpc framework, which aims to address the challenges in soft robot modeling and control. A model and mpc controller of a pneumatic soft robot arm was constructed via the method, and its performance was evaluated over several trajectory following tasks in the real world. This dissertation contributes fundamental theory and practical algorithms for the implementation of the koopman operator theory across distinctive types of robots. In nature, animals with soft body parts demonstrate remarkable control over their shape, such as an elephant trunk wrapping around a tree branch to pick it up.

Modeling And Control Of Soft Robots Using The Koopman Operator And Model Predictive Control | DeepAI
Modeling And Control Of Soft Robots Using The Koopman Operator And Model Predictive Control | DeepAI Currently, researchers have proposed a data driven model predictive control (mpc) approach based on the koopman operator, known as kmpc framework, which aims to address the challenges in soft robot modeling and control. A model and mpc controller of a pneumatic soft robot arm was constructed via the method, and its performance was evaluated over several trajectory following tasks in the real world. This dissertation contributes fundamental theory and practical algorithms for the implementation of the koopman operator theory across distinctive types of robots. In nature, animals with soft body parts demonstrate remarkable control over their shape, such as an elephant trunk wrapping around a tree branch to pick it up.
Data-driven Control of Soft Robots Using Koopman Operator Theory
Data-driven Control of Soft Robots Using Koopman Operator Theory
Related image with data driven control of soft robots using koopman operator theory

 Data-Driven Control Of Soft Robots Using Koopman Operator Theory")



 DATA-DRIVEN CONTROL OF THE CHEMOSTAT USING THE KOOPMAN OPERATOR THEORY")






Related image with data driven control of soft robots using koopman operator theory




About "Data Driven Control Of Soft Robots Using Koopman Operator Theory"
Comments are closed.