
Deep Koopman Operator With Control For Nonlinear Systems | DeepAI
Deep Koopman Operator With Control For Nonlinear Systems | DeepAI In this work, we propose an end to end deep learning framework to learn the koopman embedding function and koopman operator together to alleviate such difficulties. Formance when the system is fully nonlinear with the control input. in this work, we propose an end to end deep learning framework to learn the koopman embedding.

Learning Deep Neural Network Representations For Koopman Operators Of Nonlinear Dynamical ...
Learning Deep Neural Network Representations For Koopman Operators Of Nonlinear Dynamical ... Soure code for deep koopman with control. contribute to haojieshi98/deepkoopmanwithcontrol development by creating an account on github. Modeling and control of nonlinear robotic systems have been challenging tasks. if a linear approximate embed ding space for nonlinear dynamical robotic systems. This paper presents a data driven control strategy for nonlinear dynamical systems, which fully exploits the advantages of the koopman operator in globally linearizing nonlinear dynamical. We describe a deep learning architecture for parameterizing these classes of models, and show experimentally that each significantly outperforms traditional koopman models in trajectory prediction for two nonlinear, nonconvex dynamic systems.

Closed-Loop Koopman Operator Approximation | DeepAI
Closed-Loop Koopman Operator Approximation | DeepAI This paper presents a data driven control strategy for nonlinear dynamical systems, which fully exploits the advantages of the koopman operator in globally linearizing nonlinear dynamical. We describe a deep learning architecture for parameterizing these classes of models, and show experimentally that each significantly outperforms traditional koopman models in trajectory prediction for two nonlinear, nonconvex dynamic systems. This paper proposes a novel approach for modeling and controlling nonlinear systems with varying parameters. In this work, we propose an end to end deep learning framework to learn the koopman embedding function and koopman operator together to alleviate such difficulties. We develop a data driven, model free approach for the optimal control of the dynamical system. the proposed approach relies on the deep neural network (dnn) based learning of koopman operator for the purpose of control. It maps nonlinearsystems into equivalent linear systems in embedding space, ready for real timelinear control methods. however, designing an appropriate koopman embeddingfunction remains a challenging task.
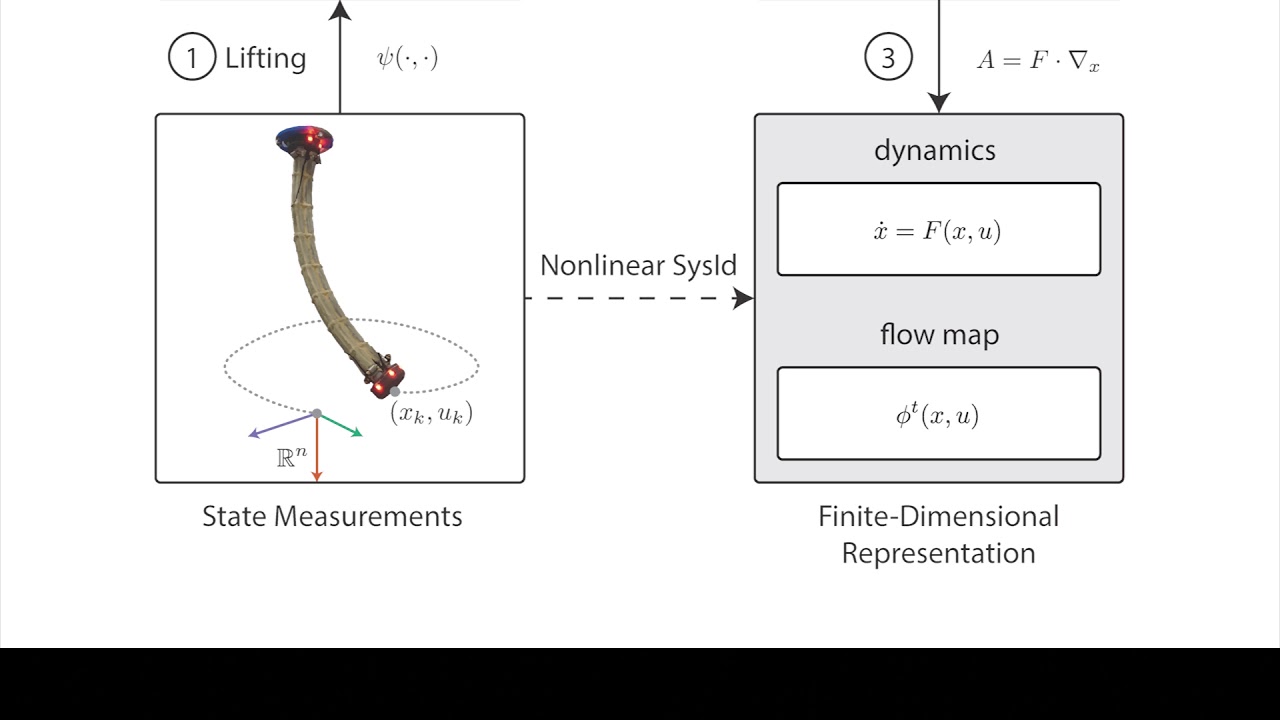
Nonlinear System Identification of Soft Robot Dynamics Using Koopman Operator Theory - ICRA 2019
Nonlinear System Identification of Soft Robot Dynamics Using Koopman Operator Theory - ICRA 2019
Related image with deep koopman operator with control for nonlinear systems deepai












Related image with deep koopman operator with control for nonlinear systems deepai




About "Deep Koopman Operator With Control For Nonlinear Systems Deepai"
Comments are closed.