First Steps Toward Automatically Generating Bipedal Robotic Walking From Human Data
 First Steps Toward Automatically Generating Bipedal Robotic Walking From Human Data")
(PDF) First Steps Toward Automatically Generating Bipedal Robotic Walking From Human Data
(PDF) First Steps Toward Automatically Generating Bipedal Robotic Walking From Human Data Abstract this paper presents the first steps toward automatically generating robotic walking from human walking data through the use of human inspired control. This paper presents the first steps toward automatically generating robotic walking from human walking data through the use of human inspired control.

Learning Bipedal Walking On Planned Footsteps For Humanoid Robots | DeepAI
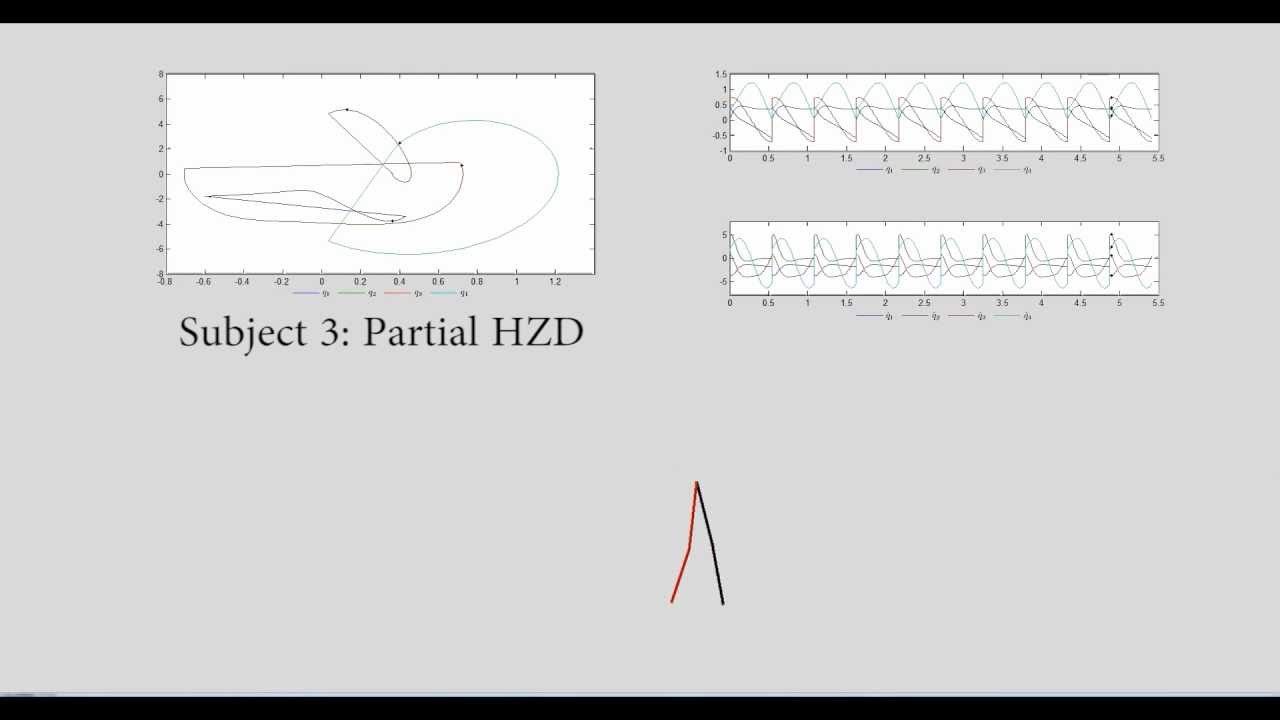
Learning Bipedal Walking On Planned Footsteps For Humanoid Robots | DeepAI This paper presents the first steps toward going from human data to formal controller design to experimental realization in the context of underactuated bipedal. In this work, an approach towards experimental realization of underactuated bipedal robotic walking using human data is presented. There fore, using only human data, we are able to automatically generate a stable walking gait for a bipedal robot which is as "human like" as possible. table containing parameter. Videos accompanying the paper "first steps toward automatically generating bipedal robotic walking from human data." three types of bipedal robotic walking o.
 Bipedal Walking Robot Using Deep Deterministic Policy Gradient")
(PDF) Bipedal Walking Robot Using Deep Deterministic Policy Gradient
(PDF) Bipedal Walking Robot Using Deep Deterministic Policy Gradient There fore, using only human data, we are able to automatically generate a stable walking gait for a bipedal robot which is as "human like" as possible. table containing parameter. Videos accompanying the paper "first steps toward automatically generating bipedal robotic walking from human data." three types of bipedal robotic walking o. This paper presents the first steps toward automatically generating robotic walking from human walking data through the use of human inspired control. Abstract this paper presents the process of translating formal theory and methods to efficient algorithms in the context of human inspired control of bipedal robots, with the end result being experimentally realized robust and efficient robotic walk ing with amber. The thesis shows how to achieve bipedal robotic walking on flat ground, up slope and rough terrain by using human inspired control by considering human walking data and finding outputs that, when calculated from the human data, are described by simple functions of time. This paper presents the first steps toward automatically generating robotic walking from human walking data through the use of human inspired control.
First Steps Toward Automatically Generating Bipedal Robotic Walking from Human Data
First Steps Toward Automatically Generating Bipedal Robotic Walking from Human Data
Related image with first steps toward automatically generating bipedal robotic walking from human data
 First Steps Toward Automatically Generating Bipedal Robotic Walking From Human Data")

 Bipedal Walking Robot Using Deep Deterministic Policy Gradient")




 A Step Towards Generating Human-Like Walking Gait Via Trajectory Optimization Through ...")

")
 Dynamically Stable Bipedal Robotic Walking With NAO Via Human-inspired Hybrid Zero Dynamics")

Related image with first steps toward automatically generating bipedal robotic walking from human data




About "First Steps Toward Automatically Generating Bipedal Robotic Walking From Human Data"
Comments are closed.