Github Catta134 Feedback Linearization Easy Way To Take Your Matrix To Linearizate Yor

Github404
Github404 To use this methods you should put your dinamic system into the 'affine control form'. g,f,h are the matrix that take place in this formulation, in particular h is the exit function; g is the control matrix function and f the state function. G is the control matrix function and f the state function. all these are put as symbolic and not linear.

Adaptive Learning Feedback Linearization | PDF | Control Theory | Discrete Time And Continuous Time
Adaptive Learning Feedback Linearization | PDF | Control Theory | Discrete Time And Continuous Time Easy way to take your matrix to linearizate yor dinamic system feedback linearization/e fun.m at master · catta134/feedback linearization. Safely publish packages, store your packages alongside your code, and share your packages privately with your team. Regulation and trajectory tracking of flexible joint link. state transformation and feedback linearization are applied. it is a solution of assignment2 in fundamentals of robot control course for rocv master's program at innopolis university. If you want to design an effective non linear controller, one of the options is to use feedback linearization, as mentioned by mostafa salam in his answer.

GitHub - Alspitz/feedback-linearization: Feedback Linearization For Quadrotors
GitHub - Alspitz/feedback-linearization: Feedback Linearization For Quadrotors Regulation and trajectory tracking of flexible joint link. state transformation and feedback linearization are applied. it is a solution of assignment2 in fundamentals of robot control course for rocv master's program at innopolis university. If you want to design an effective non linear controller, one of the options is to use feedback linearization, as mentioned by mostafa salam in his answer. Put the system in companion form; linearize the system through feedback linearization techniques; control the system with standard linear methods. In this tutorial, we provide an introduction to feedback linearization, and how this method can be used to elegantly derive controllers of dynamical systems. we also provide simulink block diagrams that simulate the closed loop system. Which we can now design a controler around as a linear system. 1. write the system in controller form by identifying a,b, the equation can be re written as the following. 2. prove that the pd with gravity compensation law is a form of feedback linearization. consider a mixing tank fed by two inlets. If i have a feedback linearized system, can i implement a luenberger observer or kalman filter as i would for a linear system to estimate the transformed state, or should i use something like an unscented kalman filter?.

GitHub - Kiranchinta23/Modeling-and-Control-of-a-Two-Link-Robot-using-Feedback-Linearization
GitHub - Kiranchinta23/Modeling-and-Control-of-a-Two-Link-Robot-using-Feedback-Linearization Put the system in companion form; linearize the system through feedback linearization techniques; control the system with standard linear methods. In this tutorial, we provide an introduction to feedback linearization, and how this method can be used to elegantly derive controllers of dynamical systems. we also provide simulink block diagrams that simulate the closed loop system. Which we can now design a controler around as a linear system. 1. write the system in controller form by identifying a,b, the equation can be re written as the following. 2. prove that the pd with gravity compensation law is a form of feedback linearization. consider a mixing tank fed by two inlets. If i have a feedback linearized system, can i implement a luenberger observer or kalman filter as i would for a linear system to estimate the transformed state, or should i use something like an unscented kalman filter?.

GitHub - Kiranchinta23/Modeling-and-Control-of-a-Two-Link-Robot-using-Feedback-Linearization
GitHub - Kiranchinta23/Modeling-and-Control-of-a-Two-Link-Robot-using-Feedback-Linearization Which we can now design a controler around as a linear system. 1. write the system in controller form by identifying a,b, the equation can be re written as the following. 2. prove that the pd with gravity compensation law is a form of feedback linearization. consider a mixing tank fed by two inlets. If i have a feedback linearized system, can i implement a luenberger observer or kalman filter as i would for a linear system to estimate the transformed state, or should i use something like an unscented kalman filter?.
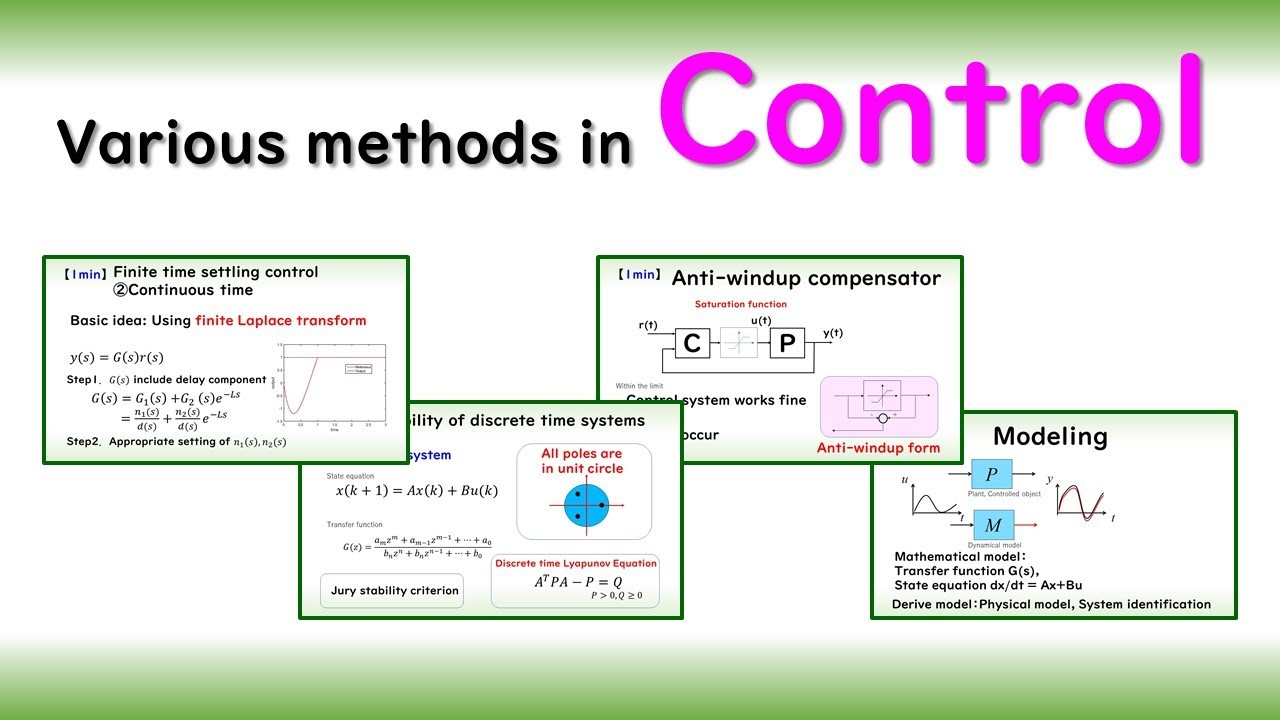
Various methods in Control (LMIs, Stability, mathematics)
Various methods in Control (LMIs, Stability, mathematics)
Related image with github catta134 feedback linearization easy way to take your matrix to linearizate yor







 By ...")




Related image with github catta134 feedback linearization easy way to take your matrix to linearizate yor
")

")

About "Github Catta134 Feedback Linearization Easy Way To Take Your Matrix To Linearizate Yor"
Comments are closed.