Github Ebrahimabdelghfar Rotary Inverted Pendulum Hybrid Control System Using Lqr And

GitHub - Ebrahimabdelghfar/Rotary-Inverted-Pendulum: Hybrid Control System Using LQR And ...
GitHub - Ebrahimabdelghfar/Rotary-Inverted-Pendulum: Hybrid Control System Using LQR And ... This project involves the design and implementation of a rotary inverted pendulum system using arduino and simulink. the system consists of a motor with a built in encoder and an incremental rotary encoder for measuring the angle of the pendulum. Robotics software engineer. ebrahimabdelghfar has 53 repositories available. follow their code on github.

Controller Design For Rotary Inverted Pendulum System Using Particle Swarm Optimization ...
Controller Design For Rotary Inverted Pendulum System Using Particle Swarm Optimization ... You can create a release to package software, along with release notes and links to binary files, for other people to use. learn more about releases in our docs. Hybrid control system using lqr and hardware in loop rotary inverted pendulum/motormodelestimated.slx at main · ebrahimabdelghfar/rotary inverted pendulum. The control system constantly monitors the angle of the pendulum and makes adjustments to shift the pivot point horizontally. this action effectively repositions the pivot point beneath the center of mass, preventing the pendulum from falling over and keeping it balanced. An inverted pendulum that jumps and balances. it's a simplified version of the cubli that you can build yourself.

GitHub - Ebrahimabdelghfar/Rotary-Inverted-Pendulum: Hybrid Control System Using LQR And ...
GitHub - Ebrahimabdelghfar/Rotary-Inverted-Pendulum: Hybrid Control System Using LQR And ... The control system constantly monitors the angle of the pendulum and makes adjustments to shift the pivot point horizontally. this action effectively repositions the pivot point beneath the center of mass, preventing the pendulum from falling over and keeping it balanced. An inverted pendulum that jumps and balances. it's a simplified version of the cubli that you can build yourself. In this project we were tasked to create a rotary inverted pendulum as a part of our hybrid control course. we applied our solution using lqr controller implemented on matlab hardware. This project provides a 3d printable and modular version of the platform, suitable for both undergraduate and graduate level education. it consists of a rotary base driven by a dc motor, with a rigid pendulum attached at the end. To address the robustness issue in lqr controller, this paper proposes a novel robust lqr based adaptive neural based fuzzy inference system (anfis) controller, which is a hybrid of lqr. This project involves the design and implementation of a rotary inverted pendulum system using arduino and simulink. the system consists of a motor with a built in encoder and an incremental rotary encoder for measuring the angle of the pendulum.

GitHub - Ebrahimabdelghfar/Rotary-Inverted-Pendulum: Hybrid Control System Using LQR And ...
GitHub - Ebrahimabdelghfar/Rotary-Inverted-Pendulum: Hybrid Control System Using LQR And ... In this project we were tasked to create a rotary inverted pendulum as a part of our hybrid control course. we applied our solution using lqr controller implemented on matlab hardware. This project provides a 3d printable and modular version of the platform, suitable for both undergraduate and graduate level education. it consists of a rotary base driven by a dc motor, with a rigid pendulum attached at the end. To address the robustness issue in lqr controller, this paper proposes a novel robust lqr based adaptive neural based fuzzy inference system (anfis) controller, which is a hybrid of lqr. This project involves the design and implementation of a rotary inverted pendulum system using arduino and simulink. the system consists of a motor with a built in encoder and an incremental rotary encoder for measuring the angle of the pendulum.

GitHub - Ebrahimabdelghfar/Rotary-Inverted-Pendulum: Hybrid Control System Using LQR And ...
GitHub - Ebrahimabdelghfar/Rotary-Inverted-Pendulum: Hybrid Control System Using LQR And ... To address the robustness issue in lqr controller, this paper proposes a novel robust lqr based adaptive neural based fuzzy inference system (anfis) controller, which is a hybrid of lqr. This project involves the design and implementation of a rotary inverted pendulum system using arduino and simulink. the system consists of a motor with a built in encoder and an incremental rotary encoder for measuring the angle of the pendulum.
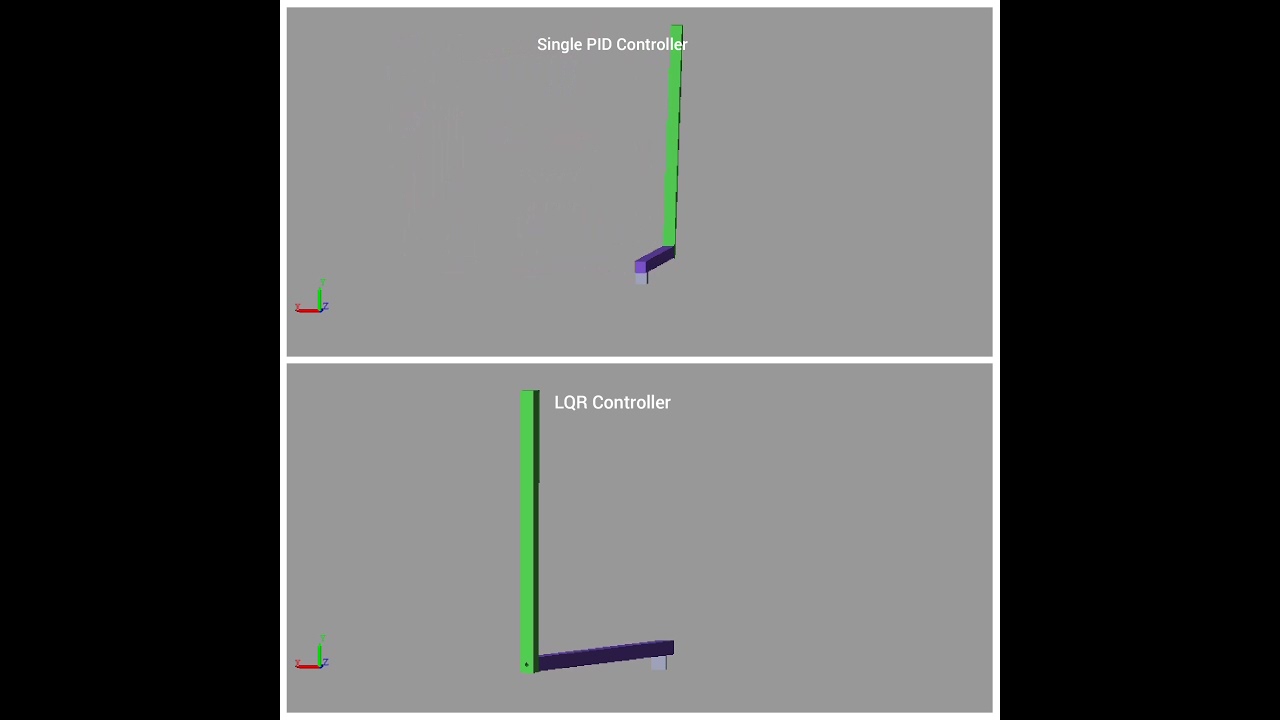
PID controller Vs LQR Controller for rotary inverted pendulum || STRIPS 1.0
PID controller Vs LQR Controller for rotary inverted pendulum || STRIPS 1.0
Related image with github ebrahimabdelghfar rotary inverted pendulum hybrid control system using lqr and












Related image with github ebrahimabdelghfar rotary inverted pendulum hybrid control system using lqr and


![Linear Quadratic Regulator (LQR) Control for the Inverted Pendulum on a Cart [Control Bootcamp]](https://i0.wp.com/ytimg.googleusercontent.com/vi/1_UobILf3cc/mqdefault.jpg?resize=91,91 "Linear Quadratic Regulator (LQR) Control for the Inverted Pendulum on a Cart [Control Bootcamp]")

About "Github Ebrahimabdelghfar Rotary Inverted Pendulum Hybrid Control System Using Lqr And"
Comments are closed.