Grasp Transfer For Deformable Objects By Functional Map Correspondence
 Grasp Transfer For Deformable Objects By Functional Map Correspondence")
(PDF) Grasp Transfer For Deformable Objects By Functional Map Correspondence
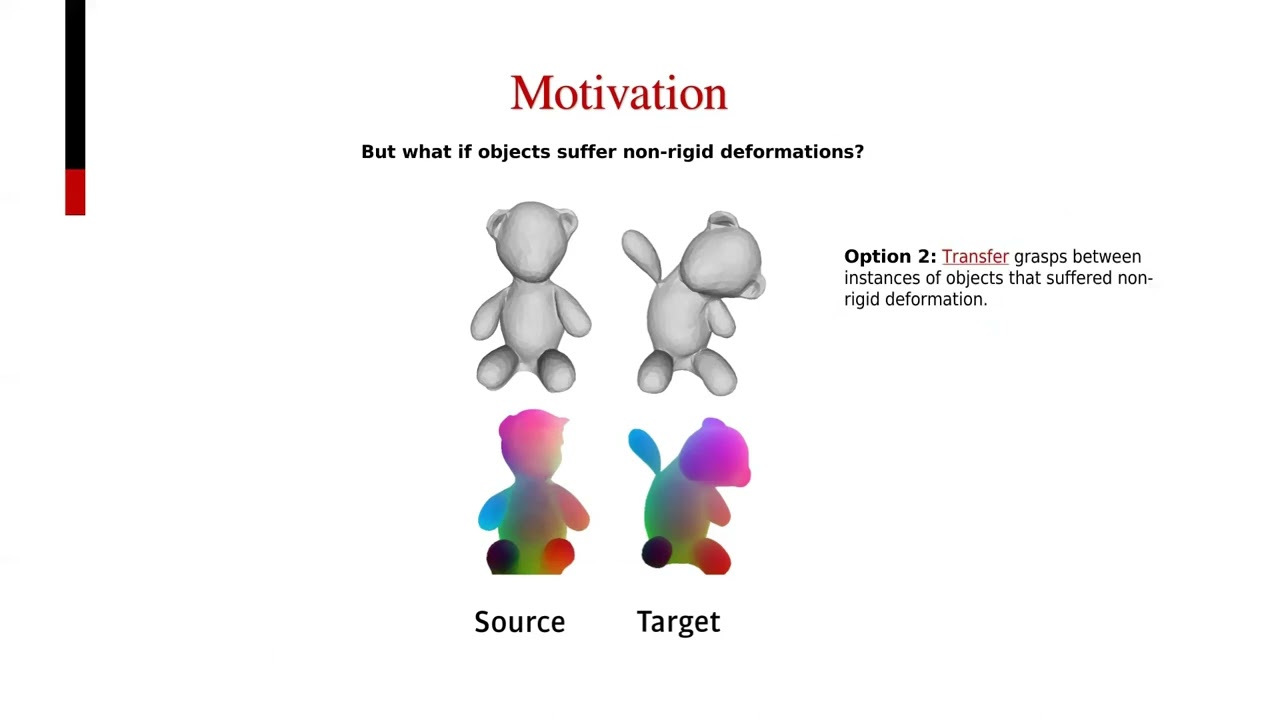
(PDF) Grasp Transfer For Deformable Objects By Functional Map Correspondence In this paper, we focus on the problem of adapting a known grasp of a deformable object, to find a corresponding stable grasp on a different configuration (i.e., a different deformation) of that object. Abstract: handling object deformations for robotic grasping is still a major problem to solve. in this paper, we propose an efficient learning free solution for this problem where generated grasp hypotheses of a region of an object are adapted to its deformed configurations.

Figure 1 From Grasp Transfer For Deformable Objects By Functional Map Correspondence | Semantic ...
Figure 1 From Grasp Transfer For Deformable Objects By Functional Map Correspondence | Semantic ... Proposed pipeline of our methodology to transfer non rigid grasps using functional maps. it consists of three steps: grasp model generation (top – green); finding shape correspondences (middle – blue); and, grasp transfer (last – red). Spotlight talk at 2nd workshop on representing and manipulating deformable objects @ icra 2022 workshop website: https://deformable workshop.github.io/icra20. Handling object deformations for robotic grasping is still a major problem to solve. in this paper, we propose an efficient learning free solution for adapting grasp hypothesis to deformed versions of an object. In this paper, we propose an efficient learning free solution for this problem where generated grasp hypotheses of a region of an object are adapted to its deformed configurations.

DeRi-IGP: Manipulating Rigid Objects Using Deformable Objects Via Iterative Grasp-Pull | DeepAI
DeRi-IGP: Manipulating Rigid Objects Using Deformable Objects Via Iterative Grasp-Pull | DeepAI Handling object deformations for robotic grasping is still a major problem to solve. in this paper, we propose an efficient learning free solution for adapting grasp hypothesis to deformed versions of an object. In this paper, we propose an efficient learning free solution for this problem where generated grasp hypotheses of a region of an object are adapted to its deformed configurations. Below, we present our methodology of grasp transfer to handle deformable objects. we start with our data acquisition process and present in detail the steps mentioned in pipeline. Dyke, shrec 2020 track: non rigid shape correspondence of physically based deformations, eurographics workshop on 3d object retrieval coumans, pybullet, a python module for physics simulation for games, robotics and machine learning. We have compared the performance of our method with two different state of the art correspondence mapping techniques in terms of grasp stability and region grasping accuracy for 4 different objects with 5 different deformations. This paper shows how a robot arm can follow and grasp moving objects tracked by a vision system, as is needed when a human hands over an object to the robot during collaborative working.
Grasp Transfer for Deformable Objects by Functional Map Correspondence
Grasp Transfer for Deformable Objects by Functional Map Correspondence
Related image with grasp transfer for deformable objects by functional map correspondence
 Grasp Transfer For Deformable Objects By Functional Map Correspondence")











Related image with grasp transfer for deformable objects by functional map correspondence

![[ICRA 2023] DexGraspNet: A Large-Scale Robotic Dexterous Grasp Dataset ...](https://i0.wp.com/ytimg.googleusercontent.com/vi/1uEMAruZhNs/mqdefault.jpg?resize=91,91 "[ICRA 2023] DexGraspNet: A Large-Scale Robotic Dexterous Grasp Dataset ...")


About "Grasp Transfer For Deformable Objects By Functional Map Correspondence"
Comments are closed.