Model Based Versus Model Free Optimal Tracking For Soft Robots Analytical And Data Driven

Model-based Versus Model-free Optimal Tracking For Soft Robots: Analytical And Data-driven ...
Model-based Versus Model-free Optimal Tracking For Soft Robots: Analytical And Data-driven ... Section 2 introduces the modeling methodology to characterize the dynamics of soft robots, including the construction of the analytical and data driven koopman linear models. Reinforcement learning includes a class of approximation algorithms which can be much more practical than dynamic programming in real world applications.

Data Models Applied To Soft Robot Modeling And Control: A Review | DeepAI
Data Models Applied To Soft Robot Modeling And Control: A Review | DeepAI To address these challenges, we propose a hybrid modeling approach that combines machine learning methods with an existing first principles model in order to improve overall performance for a sampling based non linear model predictive controller. Models are essential tools in robotics, such as robot’s own body dynamics and kinematics models, actuator/motor models, and the models of external controllable objects. in this paper, we review the latest advances in model based and model free ap proaches with a strong focus on robot control. A discussion about the advantages and limitations of the existing modeling and control approaches is presented, and we forecast the future of data driven approaches in soft robots. In this paper, we propose and compare two different modeling approaches to estimating the shape deformation of a two dimensional pneumatic soft robot (2d psr): an analytical model based.

Figure 3 From Machine Learning For Soft Robot Sensing And Control: A Tutorial Study | Semantic ...
Figure 3 From Machine Learning For Soft Robot Sensing And Control: A Tutorial Study | Semantic ... A discussion about the advantages and limitations of the existing modeling and control approaches is presented, and we forecast the future of data driven approaches in soft robots. In this paper, we propose and compare two different modeling approaches to estimating the shape deformation of a two dimensional pneumatic soft robot (2d psr): an analytical model based. In this article, we provided an extensive comparison of model free rl and model based nmpc methods. we began with finding a proper formulation of nmpc and rl problems tackling the same task of a swing up and balancing motion of a cart–pendulum system. To address these challenges, we propose a hybrid modeling approach that combines machine learning methods with an existing first principles model in order to improve overall performance for a sampling based non linear model predictive controller. In this paper, we propose and compare two different modeling approaches to estimating the shape deformation of a two dimensional pneumatic soft robot (2d psr): an analytical model based on the motion and air pressure dynamics and a data driven model using koopman operator theory and finite dimensional approximate realization of the extended. We evaluated the trajectory tracking performance of the soft robot controlled by dk mpc and compared it with the performance achieved using the same closed loop mpc controller based on the rbf based koopman model (k mpc).
 Stability Analysis Of A One Degree-of-Freedom Robot Model With Sampled Digital ...")
(PDF) Stability Analysis Of A One Degree-of-Freedom Robot Model With Sampled Digital ...
(PDF) Stability Analysis Of A One Degree-of-Freedom Robot Model With Sampled Digital ... In this article, we provided an extensive comparison of model free rl and model based nmpc methods. we began with finding a proper formulation of nmpc and rl problems tackling the same task of a swing up and balancing motion of a cart–pendulum system. To address these challenges, we propose a hybrid modeling approach that combines machine learning methods with an existing first principles model in order to improve overall performance for a sampling based non linear model predictive controller. In this paper, we propose and compare two different modeling approaches to estimating the shape deformation of a two dimensional pneumatic soft robot (2d psr): an analytical model based on the motion and air pressure dynamics and a data driven model using koopman operator theory and finite dimensional approximate realization of the extended. We evaluated the trajectory tracking performance of the soft robot controlled by dk mpc and compared it with the performance achieved using the same closed loop mpc controller based on the rbf based koopman model (k mpc).

A Stable Analytical Solution Method For Car-Like Robot Trajectory Tracking And Optimization
A Stable Analytical Solution Method For Car-Like Robot Trajectory Tracking And Optimization In this paper, we propose and compare two different modeling approaches to estimating the shape deformation of a two dimensional pneumatic soft robot (2d psr): an analytical model based on the motion and air pressure dynamics and a data driven model using koopman operator theory and finite dimensional approximate realization of the extended. We evaluated the trajectory tracking performance of the soft robot controlled by dk mpc and compared it with the performance achieved using the same closed loop mpc controller based on the rbf based koopman model (k mpc).
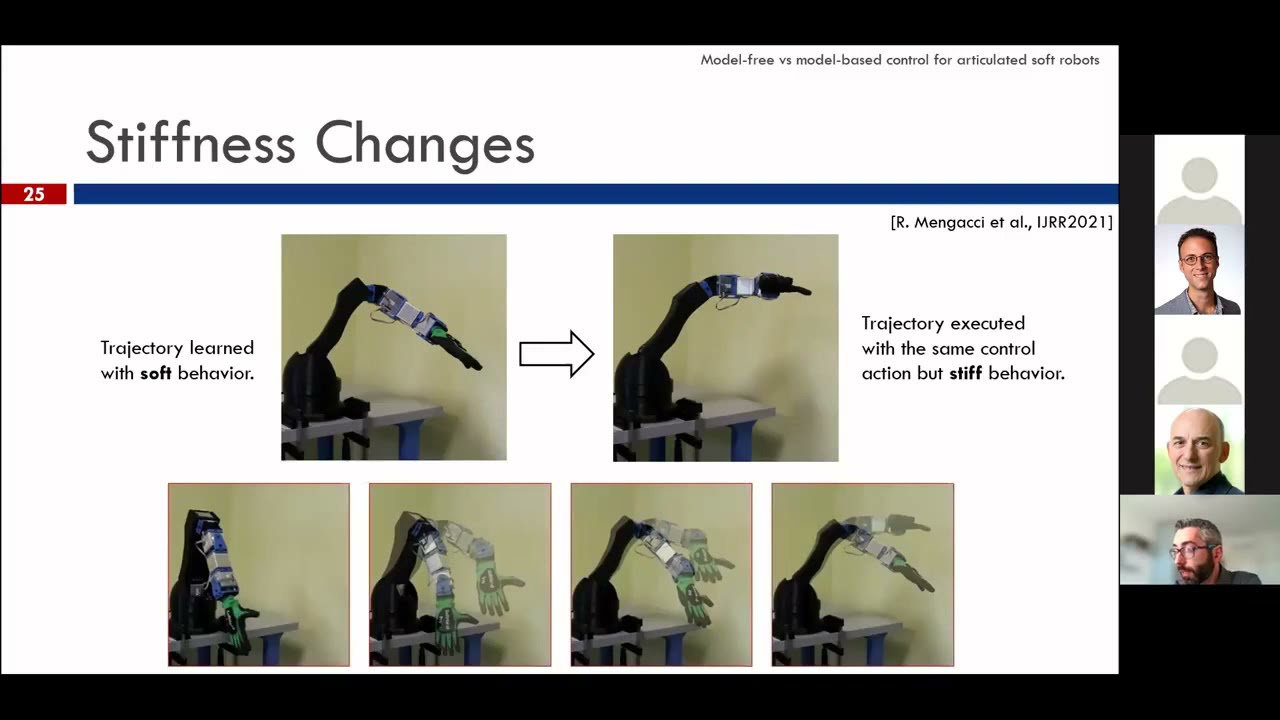
Model-free vs model-based control for articulated soft robots - Franco Angelini
Model-free vs model-based control for articulated soft robots - Franco Angelini
Related image with model based versus model free optimal tracking for soft robots analytical and data driven



 Stability Analysis Of A One Degree-of-Freedom Robot Model With Sampled Digital ...")



 Model-Based Analysis Of The Accuracy Of Tracking Control And Energy Efficiency Of A Six ...")

 Stability Analysis Of A One Degree Of Freedom Robot Model With Sampled Digital ...")


Related image with model based versus model free optimal tracking for soft robots analytical and data driven




About "Model Based Versus Model Free Optimal Tracking For Soft Robots Analytical And Data Driven"
Comments are closed.