Nonlinear Control Of A Tri Rotor Based On The Decomposition The Dynamic Model And Feedback

Nonlinear Control Of A Tri Rotor Based On The Decomposition The Dynamic Model And Feedback Lineariza
Nonlinear Control Of A Tri Rotor Based On The Decomposition The Dynamic Model And Feedback Lineariza The modeling and flight control system design for the yaw channel of an unmanned aerial vehicle (uav) helicopter is presented using a newly developed composite nonlinear feedback (cnf) control technique, which has achieved a level 1 performance according to the standards set for military rotorcraft. In this paper, a compound control method combining model prediction control improved with disturbance observer and sliding mode nonlinear dynamic inversion is proposed for the three culvert rotor composite vtol uav with tiltable tail rotor.

Nonlinear Control Of A Tri - Rotor Based On The Decomposition The Dynamic Model And Feedback ...
Nonlinear Control Of A Tri - Rotor Based On The Decomposition The Dynamic Model And Feedback ... A nonlinear control technique for autonomous control of a tri rotor unmanned aerial vehicle is presented in this paper. first, a comprehensive mathematical model is developed using the newton–euler approach for a tri rotor, which is found to be highly nonlinear and coupled. Since the dynamical model of a single tri rotor uav is highly coupled and nonlinear, a robust feedback linearization technique is first applied to each tri rotor to obtain simpler closed loop dynamics. A small scale tri rotor test bed with tilting propellers has been built to test flight control laws in view of the construction of a larger tilt rotor uav. as a first step to achieve autonomous flight capabilities, a nonlinear dynamic inversion based flight controller is developed. This paper presents the tri rotor uav dynamic modeling and divides it to the control loops under the condition that the response of the inner loop is faster than the response of the outer.
 Attitude Control Of A Single Tilt Tri-Rotor UAV System: Dynamic Modeling And Each Channel ...")
(PDF) Attitude Control Of A Single Tilt Tri-Rotor UAV System: Dynamic Modeling And Each Channel ...
(PDF) Attitude Control Of A Single Tilt Tri-Rotor UAV System: Dynamic Modeling And Each Channel ... A small scale tri rotor test bed with tilting propellers has been built to test flight control laws in view of the construction of a larger tilt rotor uav. as a first step to achieve autonomous flight capabilities, a nonlinear dynamic inversion based flight controller is developed. This paper presents the tri rotor uav dynamic modeling and divides it to the control loops under the condition that the response of the inner loop is faster than the response of the outer. The paper highlights the destabilisation effect of unmodelled actuator dynamics when applying feedback linearisation. to overcome this difficulty, a two stage feedback linearisation technique is proposed to compensate for actuator dynamics and subsequently linearise nonlinear systems. This paper has implemented nonlinear control strategy for the single tilt tri rotor aerial robot. based on newton euler’s laws, the linear and nonlinear mathematical models of tri rotor uavs are obtained. What can be concluded from the above is that studies on tri rotor uavs mainly focus on dynamic modeling and flight control, which have been validated by numerical simulations or real time experiments, while quite few studies have taken the ftc of tri rotor uavs into consideration. Herein, the dynamic model of this novel uav is developed, which has nine controllable variables. owing to the nonlinear and coupled nature of the system, many conventional nonlinear control allocation algorithms are too computationally complex to be calculated online.
 Conversion Control Of A Tilt Tri-rotor Unmanned Aerial Vehicle With Modeling Uncertainty")
(PDF) Conversion Control Of A Tilt Tri-rotor Unmanned Aerial Vehicle With Modeling Uncertainty
(PDF) Conversion Control Of A Tilt Tri-rotor Unmanned Aerial Vehicle With Modeling Uncertainty The paper highlights the destabilisation effect of unmodelled actuator dynamics when applying feedback linearisation. to overcome this difficulty, a two stage feedback linearisation technique is proposed to compensate for actuator dynamics and subsequently linearise nonlinear systems. This paper has implemented nonlinear control strategy for the single tilt tri rotor aerial robot. based on newton euler’s laws, the linear and nonlinear mathematical models of tri rotor uavs are obtained. What can be concluded from the above is that studies on tri rotor uavs mainly focus on dynamic modeling and flight control, which have been validated by numerical simulations or real time experiments, while quite few studies have taken the ftc of tri rotor uavs into consideration. Herein, the dynamic model of this novel uav is developed, which has nine controllable variables. owing to the nonlinear and coupled nature of the system, many conventional nonlinear control allocation algorithms are too computationally complex to be calculated online.
 Stabilization Of Nonlinear Control Systems Via Composition Operators")
(PDF) Stabilization Of Nonlinear Control Systems Via Composition Operators
(PDF) Stabilization Of Nonlinear Control Systems Via Composition Operators What can be concluded from the above is that studies on tri rotor uavs mainly focus on dynamic modeling and flight control, which have been validated by numerical simulations or real time experiments, while quite few studies have taken the ftc of tri rotor uavs into consideration. Herein, the dynamic model of this novel uav is developed, which has nine controllable variables. owing to the nonlinear and coupled nature of the system, many conventional nonlinear control allocation algorithms are too computationally complex to be calculated online.
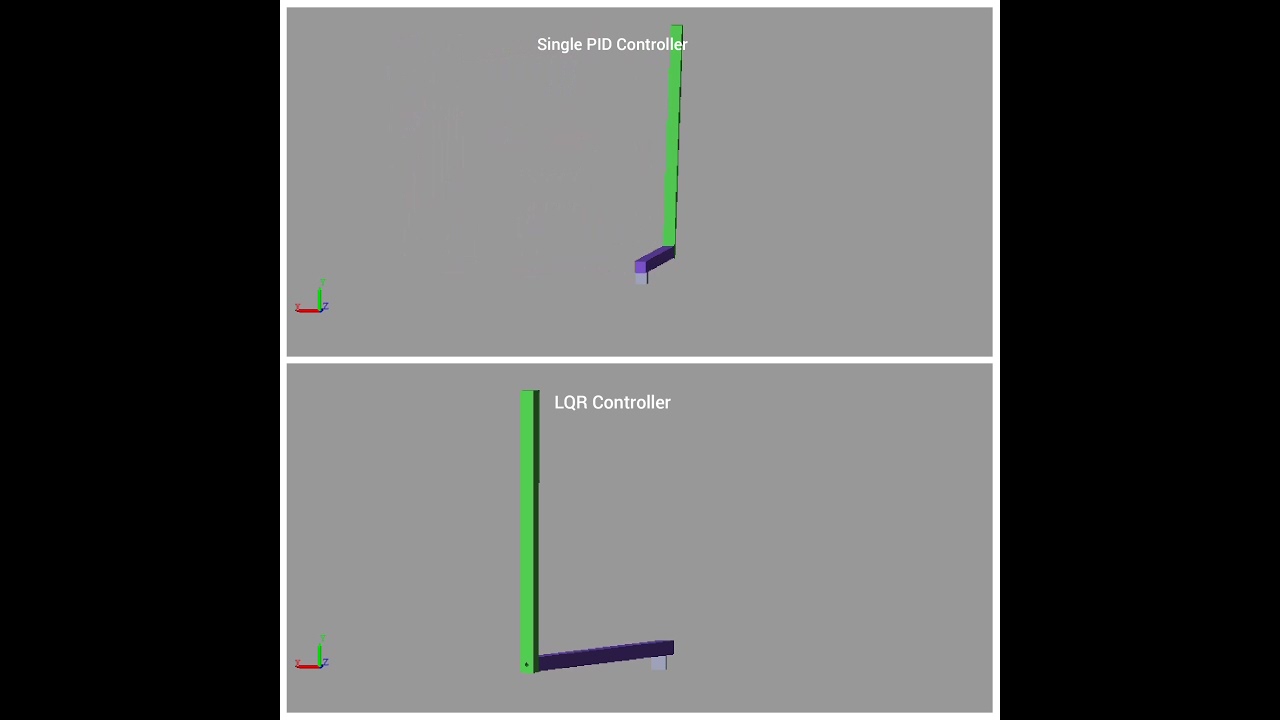
PID controller Vs LQR Controller for rotary inverted pendulum || STRIPS 1.0
PID controller Vs LQR Controller for rotary inverted pendulum || STRIPS 1.0
Related image with nonlinear control of a tri rotor based on the decomposition the dynamic model and feedback


 Attitude Control Of A Single Tilt Tri-Rotor UAV System: Dynamic Modeling And Each Channel ...")
 Conversion Control Of A Tilt Tri-rotor Unmanned Aerial Vehicle With Modeling Uncertainty")
 Stabilization Of Nonlinear Control Systems Via Composition Operators")
 Jeffcott... | Download Scientific ...")


 Autonomous Control Of Tilt Tri-Rotor Unmanned Aerial Vehicle")
 Investigation On Nonlinear Lateral-torsional Coupled Vibration Of A Rotor System With ...")


Related image with nonlinear control of a tri rotor based on the decomposition the dynamic model and feedback




About "Nonlinear Control Of A Tri Rotor Based On The Decomposition The Dynamic Model And Feedback"
Comments are closed.