Nonlinear System Identification Of Soft Robot Dynamics Using Koopman Operator Theory Icra 2019

Nonlinear System Identification Of Soft Robot Dynamics Using Koopman Operator Theory | DeepAI
Nonlinear System Identification Of Soft Robot Dynamics Using Koopman Operator Theory | DeepAI Soft robots are challenging to model due in large part to the nonlinear properties of soft materials. fortunately, this softness makes it possible to safely obs. Soft robots are challenging to model due in large part to the nonlinear properties of soft materials. fortunately, this softness makes it possible to safely observe their behavior under random control inputs, making them amenable to large scale data collection and system identification.

Nonlinear System Identification Of Soft Robot Dynamics Using Koopman Operator Theory | DeepAI
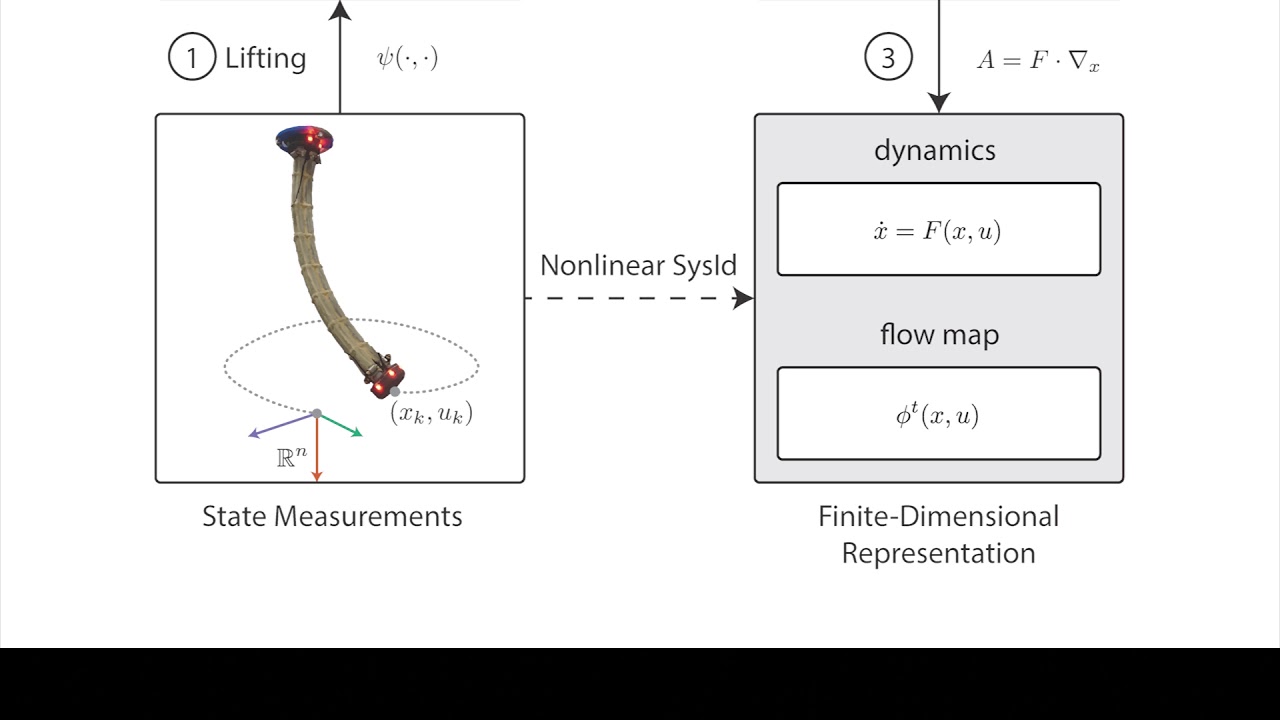
Nonlinear System Identification Of Soft Robot Dynamics Using Koopman Operator Theory | DeepAI A soft robot modeling and control scheme based on koopman operators is proposed. we also design a disturbance observer so as to incorporate the controller feedback with real time fiber. In theory, this approach involves lifting the state space to an infinite dimensional space of scalar functions (referred to as observables), where the flow of such observables along trajectories of the nonlinear dynamical system is described by the linear koopman operator. By contrast, this work explores strategies for nonlinear data driven system identification using strategies inspired by koopman analysis. general strategies that yield nonlinear models are presented for systems both with and without control. Recent advances in algorithmic development and validation for modeling and control of soft robots leveraging the koopman operator theory are reviewed and various implementations in soft robotic systems are illustrated and summarized in the review.
 Nonlinear System Identification Of Soft Robot Dynamics Using Koopman Operator Theory")
(PDF) Nonlinear System Identification Of Soft Robot Dynamics Using Koopman Operator Theory
(PDF) Nonlinear System Identification Of Soft Robot Dynamics Using Koopman Operator Theory By contrast, this work explores strategies for nonlinear data driven system identification using strategies inspired by koopman analysis. general strategies that yield nonlinear models are presented for systems both with and without control. Recent advances in algorithmic development and validation for modeling and control of soft robots leveraging the koopman operator theory are reviewed and various implementations in soft robotic systems are illustrated and summarized in the review. Soft robots are challenging to model due in large part to the nonlinear properties of soft materials. fortunately, this softness makes it possible to safely observe their behavior under random control inputs, making them amenable to large scale data collection and system identification. Challenging to model due in large part to the nonlinear properties of soft materials. fortunately, this softness makes it possible to safely observe their behavior under random control . By contrast, this work explores strategies for nonlinear data driven system identification using strategies inspired by koopman analysis. general strategies that yield nonlinear models are presented for systems both with and without control. This is the accompanying video for our submission to icra 2019. for more information, check out the preprint of our paper here: more.
Nonlinear System Identification of Soft Robot Dynamics Using Koopman Operator Theory - ICRA 2019
Nonlinear System Identification of Soft Robot Dynamics Using Koopman Operator Theory - ICRA 2019
Related image with nonlinear system identification of soft robot dynamics using koopman operator theory icra 2019


 Nonlinear System Identification Of Soft Robot Dynamics Using Koopman Operator Theory")
 Nonlinear System Identification Of Soft Robot Dynamics Using Koopman Operator Theory")





")
")
 Robust Nonlinear Optimal Control Using Koopman Operator Theory")
Related image with nonlinear system identification of soft robot dynamics using koopman operator theory icra 2019




About "Nonlinear System Identification Of Soft Robot Dynamics Using Koopman Operator Theory Icra 2019"
Comments are closed.