Online Estimation Of Point Based Volumetric Stiffness Model Using Joint Torque Sensors
![[PDF] Online Estimation Of Point-based Volumetric Stiffness Model Using Joint Torque Sensors ...](https://i0.wp.com/d3i71xaburhd42.cloudfront.net/351f51712322156925326d756e1344f0931c1903/1-Figure1-1.png?resize=650,400 "[PDF] Online Estimation Of Point-based Volumetric Stiffness Model Using Joint Torque Sensors ...")
[PDF] Online Estimation Of Point-based Volumetric Stiffness Model Using Joint Torque Sensors ...
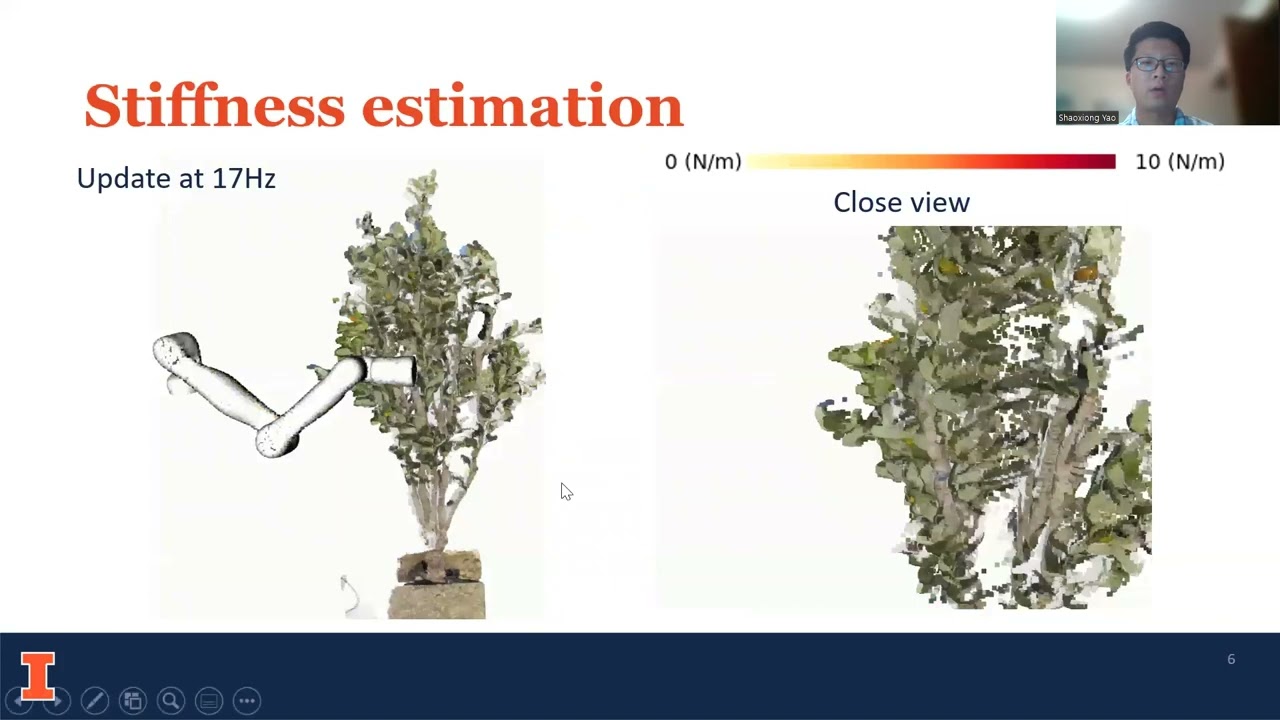
[PDF] Online Estimation Of Point-based Volumetric Stiffness Model Using Joint Torque Sensors ... We present a new volumetric stiffness field representation and a point based collision dynamics model that lends itself to rapid estimation using force or torque measurements. Spotlight talk at 2nd workshop on representing and manipulating deformable objects @ icra 2022 workshop website: https://deformable workshop.github.io/icra20.
 Model-Based Estimation Of Ankle Joint Stiffness")
(PDF) Model-Based Estimation Of Ankle Joint Stiffness
(PDF) Model-Based Estimation Of Ankle Joint Stiffness This library provides an implementation of the volumetric stiffness field (vsf), a model for heterogeneous deformable objects that enables real time estimation and simulation. This work tackles the challenge of stiffness estimation in articulated soft manipulators, and it proposes an innovative solution adding value to the previous research by removing the necessity for force/torque sensors and generalizing to multi degree of freedom robots. In this study, we propose an emg driven musculoskeletal model that relies on a set of closed form equations that enables the person specific tuning of musculoskeletal features that influence stiffness at multiple anatomical levels, i.e., joint, muscle, and tendon levels. In this study, we proposed a method for energy conservation based online tuning of the analytical model using an artificial neural network (ann) to address these challenges.

Torque-based Model Predictions And Active Stiffness Estimated During... | Download Scientific ...
Torque-based Model Predictions And Active Stiffness Estimated During... | Download Scientific ... In this study, we propose an emg driven musculoskeletal model that relies on a set of closed form equations that enables the person specific tuning of musculoskeletal features that influence stiffness at multiple anatomical levels, i.e., joint, muscle, and tendon levels. In this study, we proposed a method for energy conservation based online tuning of the analytical model using an artificial neural network (ann) to address these challenges. First, we propose a new emg driven model that can be calibrated at the joint torque and stiffness levels simultaneously during dynamic ankle joint rotations. we hypothesize this will improve joint stiffness estimation with respect to torque only calibrated models. This library provides an implementation of the volumetric stiffness field (vsf), a model for heterogeneous deformable objects that enables real time estimation and simulation. The method estimates an object’s force response given robot force or torque measurements using a novel volumetric stiffness field representation and point based contact simulator. Secondly, we present a model based online esti mation technique to estimate the 7 dimensional complete joint stiffness in various arm poses and activation levels of the two dominant arm muscles that correspond to the geometric and volume modifications of the joint stiffness profile, respectively.

Estimation Of Joint Torques Using An Artificial Neural Network Model Based On Kinematic And ...
Estimation Of Joint Torques Using An Artificial Neural Network Model Based On Kinematic And ... First, we propose a new emg driven model that can be calibrated at the joint torque and stiffness levels simultaneously during dynamic ankle joint rotations. we hypothesize this will improve joint stiffness estimation with respect to torque only calibrated models. This library provides an implementation of the volumetric stiffness field (vsf), a model for heterogeneous deformable objects that enables real time estimation and simulation. The method estimates an object’s force response given robot force or torque measurements using a novel volumetric stiffness field representation and point based contact simulator. Secondly, we present a model based online esti mation technique to estimate the 7 dimensional complete joint stiffness in various arm poses and activation levels of the two dominant arm muscles that correspond to the geometric and volume modifications of the joint stiffness profile, respectively.
 R 2 Of... | Download Scientific Diagram")
| The Joint Torque Estimation Accuracy Of All Subjects. (A) R 2 Of... | Download Scientific Diagram
| The Joint Torque Estimation Accuracy Of All Subjects. (A) R 2 Of... | Download Scientific Diagram The method estimates an object’s force response given robot force or torque measurements using a novel volumetric stiffness field representation and point based contact simulator. Secondly, we present a model based online esti mation technique to estimate the 7 dimensional complete joint stiffness in various arm poses and activation levels of the two dominant arm muscles that correspond to the geometric and volume modifications of the joint stiffness profile, respectively.
 External Joint Torque-Based Estimation Of Contact Information")
(PDF) External Joint Torque-Based Estimation Of Contact Information
(PDF) External Joint Torque-Based Estimation Of Contact Information
Online Estimation of Point-based Volumetric Stiffness Model Using Joint Torque Sensors
Online Estimation of Point-based Volumetric Stiffness Model Using Joint Torque Sensors
Related image with online estimation of point based volumetric stiffness model using joint torque sensors
![[PDF] Online Estimation Of Point-based Volumetric Stiffness Model Using Joint Torque Sensors ...](https://i0.wp.com/d3i71xaburhd42.cloudfront.net/351f51712322156925326d756e1344f0931c1903/1-Figure1-1.png?resize=91,91 "[PDF] Online Estimation Of Point-based Volumetric Stiffness Model Using Joint Torque Sensors ...")
 Model-Based Estimation Of Ankle Joint Stiffness")


 R 2 Of... | Download Scientific Diagram")
 External Joint Torque-Based Estimation Of Contact Information")




 Mathematical Representation Of Bolted-joint Stiffness: A New Suggested Model")

Related image with online estimation of point based volumetric stiffness model using joint torque sensors



![[ICRA] Variable Stiffness Control via External Torque Estimation Using LSTM](https://i0.wp.com/ytimg.googleusercontent.com/vi/D9zbfG72nlY/mqdefault.jpg?resize=91,91 "[ICRA] Variable Stiffness Control via External Torque Estimation Using LSTM")
About "Online Estimation Of Point Based Volumetric Stiffness Model Using Joint Torque Sensors"
Comments are closed.