Pdf A Novel Robust Fixed‐time Fault‐tolerant Tracking Control Of Uncertain Robot Manipulators

2006-Adaptive Dynamic Tracking Control Of Uncertain Wheeled Mobile Robot Including Actuator ...
2006-Adaptive Dynamic Tracking Control Of Uncertain Wheeled Mobile Robot Including Actuator ... This paper presents a novel robust fixed‐time fault‐tolerant control for global fixed‐time tracking of uncertain robot manipulators with actuator effectiveness faults. This paper presents a novel robust fixed time fault tolerant control for global fixed time tracking of uncertain robot manipulators with actuator effectiveness faults.
 Parallel Network-Based Sliding Mode Tracking Control For Robotic Manipulators With ...")
(PDF) Parallel Network-Based Sliding Mode Tracking Control For Robotic Manipulators With ...
(PDF) Parallel Network-Based Sliding Mode Tracking Control For Robotic Manipulators With ... This article studies an adaptive fault tolerant approach with a fixed time sliding mode for trajectory tracking of uncertain robot manipulators with actuator effectiveness faults. This paper proposes a fixed time tracking control for robot manipulators in the presence of parametric uncertainties and disturbances. an auxiliary function is first proposed for constructing a fixed time sliding manifold. This paper presents a novel robust fixed time fault tolerant control for global fixed time tracking of uncertain robot manipulators with actuator effectiveness faults. This paper presents a novel robust fixed‐time fault‐tolerant control for global fixed‐time tracking of uncertain robot manipulators with actuator effectiveness faults.

VN Observer-Based Robust Adaptive Tracking For Uncertain Robot Manipulators With External Force ...
VN Observer-Based Robust Adaptive Tracking For Uncertain Robot Manipulators With External Force ... This paper presents a novel robust fixed time fault tolerant control for global fixed time tracking of uncertain robot manipulators with actuator effectiveness faults. This paper presents a novel robust fixed‐time fault‐tolerant control for global fixed‐time tracking of uncertain robot manipulators with actuator effectiveness faults. In this paper, a robust fault tolerant control, which provides a global fixed time stability, is proposed for robot manipulators. this approach is constructed based on an integration between a fixed time second order sliding mode observer (fxtsosmo) and a fixed time sliding mode control (fxtsmc) design strategy. Neural networks are utilized to identify unknown dynamics in strict feedback nonlinear systems, and the adaptive technique is employed to estimate the parameter of actuator effectiveness. This paper presents a novel fixed time sliding mode control for the global fixed time trajectory tracking of robot manipulators subject to uncertain dynamics and bounded external disturbances. a fixed time sliding surface is proposed and a singularity free fixed time sliding mode control (sfsmc) is constructed. Develop a new terminal sliding surface featuring approximate fixed‐time convergence. propose a simple easy‐going singularity‐free sliding mode control for uncertain robot manipulators with external disturbances. prove that there exists an uniformly bounded convergence time for approximate fixed‐time tracking stability.

MS - A Novel Generalized Sliding Mode Controller For Uncertain Robot Manipulators Based On ...
MS - A Novel Generalized Sliding Mode Controller For Uncertain Robot Manipulators Based On ... In this paper, a robust fault tolerant control, which provides a global fixed time stability, is proposed for robot manipulators. this approach is constructed based on an integration between a fixed time second order sliding mode observer (fxtsosmo) and a fixed time sliding mode control (fxtsmc) design strategy. Neural networks are utilized to identify unknown dynamics in strict feedback nonlinear systems, and the adaptive technique is employed to estimate the parameter of actuator effectiveness. This paper presents a novel fixed time sliding mode control for the global fixed time trajectory tracking of robot manipulators subject to uncertain dynamics and bounded external disturbances. a fixed time sliding surface is proposed and a singularity free fixed time sliding mode control (sfsmc) is constructed. Develop a new terminal sliding surface featuring approximate fixed‐time convergence. propose a simple easy‐going singularity‐free sliding mode control for uncertain robot manipulators with external disturbances. prove that there exists an uniformly bounded convergence time for approximate fixed‐time tracking stability.
 Adaptive Robust Tracking Control Based On Backstepping Method For Uncertain Robotic ...")
(PDF) Adaptive Robust Tracking Control Based On Backstepping Method For Uncertain Robotic ...
(PDF) Adaptive Robust Tracking Control Based On Backstepping Method For Uncertain Robotic ... This paper presents a novel fixed time sliding mode control for the global fixed time trajectory tracking of robot manipulators subject to uncertain dynamics and bounded external disturbances. a fixed time sliding surface is proposed and a singularity free fixed time sliding mode control (sfsmc) is constructed. Develop a new terminal sliding surface featuring approximate fixed‐time convergence. propose a simple easy‐going singularity‐free sliding mode control for uncertain robot manipulators with external disturbances. prove that there exists an uniformly bounded convergence time for approximate fixed‐time tracking stability.
 Optimized Trajectory Tracking For Robot Manipulators With Uncertain Dynamics: A Composite ...")
(PDF) Optimized Trajectory Tracking For Robot Manipulators With Uncertain Dynamics: A Composite ...
(PDF) Optimized Trajectory Tracking For Robot Manipulators With Uncertain Dynamics: A Composite ...
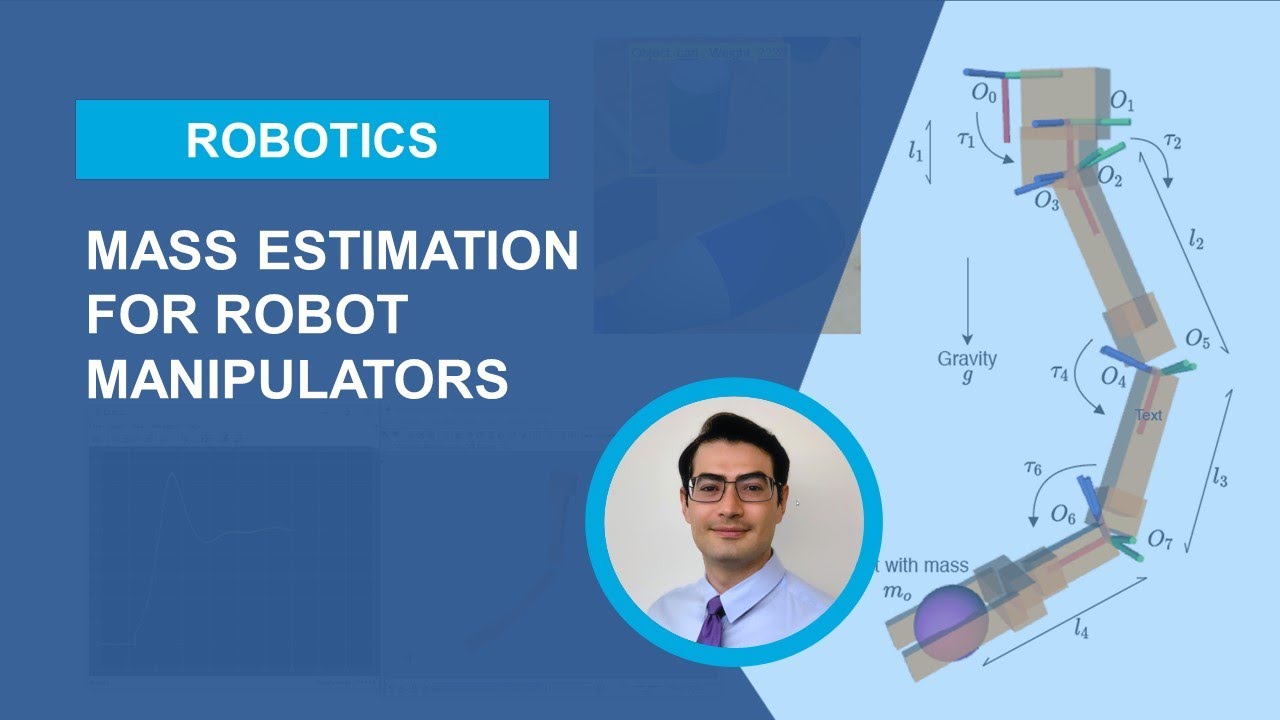
Mass Estimation for Robot Manipulators
Mass Estimation for Robot Manipulators
Related image with pdf a novel robust fixed‐time fault‐tolerant tracking control of uncertain robot manipulators


 A Novel Active Fault-Tolerant Tracking Control For Robot Manipulators With Finite-Time ...")
 A Novel Fault-Tolerant Control Method For Robot Manipulators Based On Non-Singular Fast ...")
 Robust Prescribed Trajectory Tracking Control Of A Robot Manipulator Using Adaptive Finite ...")
 A Novel Robust Fixed‐time Fault‐tolerant Tracking Control Of Uncertain Robot Manipulators")



 Continuous Finite-time Control For Uncertain Robot Manipulators With Integral Sliding Mode")
 JOURNAL OF IEEE TRANSACTIONS ON AUTOMATIC CONTROL 1 Robust Adaptive Fault-Tolerant ...")
 The Design Of Fixed-Time Observer And Finite-Time Fault-Tolerant Control For Hypersonic ...")
Related image with pdf a novel robust fixed‐time fault‐tolerant tracking control of uncertain robot manipulators

 |")


About "Pdf A Novel Robust Fixed‐time Fault‐tolerant Tracking Control Of Uncertain Robot Manipulators"
Comments are closed.