Pdf Reduced Model Predictive Control Toward Highly Dynamic Quadruped Locomotion
 Reduced Model Predictive Control Toward Highly Dynamic Quadruped Locomotion")
(PDF) Reduced Model Predictive Control Toward Highly Dynamic Quadruped Locomotion
(PDF) Reduced Model Predictive Control Toward Highly Dynamic Quadruped Locomotion This paper introduces a novel approach using the reduced single rigid body model (srbm) and an associated mpc for achieving high frequency control—crucial for highly dynamic locomotion. Abstract: controlling quadruped robots during dynamic motions presents significant challenges due to constraints on ground reaction forces and the inherent complexity of their dynamics. model predictive control (mpc) has shown promise in addressing these challenges.

Zero-Shot Retargeting Of Learned Quadruped Locomotion Policies Using Hybrid Kinodynamic Model ...
Zero-Shot Retargeting Of Learned Quadruped Locomotion Policies Using Hybrid Kinodynamic Model ... Abstract—model predictive control (mpc) relies the robot model for its control law. however, a gap always between the reduced order control model with uncertainties the real robot, which degrades its performance. This paper introduces a novel approach using the reduced single rigid body model (srbm) and an associated mpc for achieving high frequency control–crucial for highly dynamic locomotion. This paper presents an implementation of model predictive control (mpc) to determine ground reaction forces for a torque controlled quadruped robot, capable of robust locomotion at a variety of speeds. Higher layer, we propose a computationally tractable robust model predictive control (rmpc) framework that generates optimal reduced order traject.

Figure 9 From Robust Convex Model Predictive Control For Quadruped Locomotion Under ...
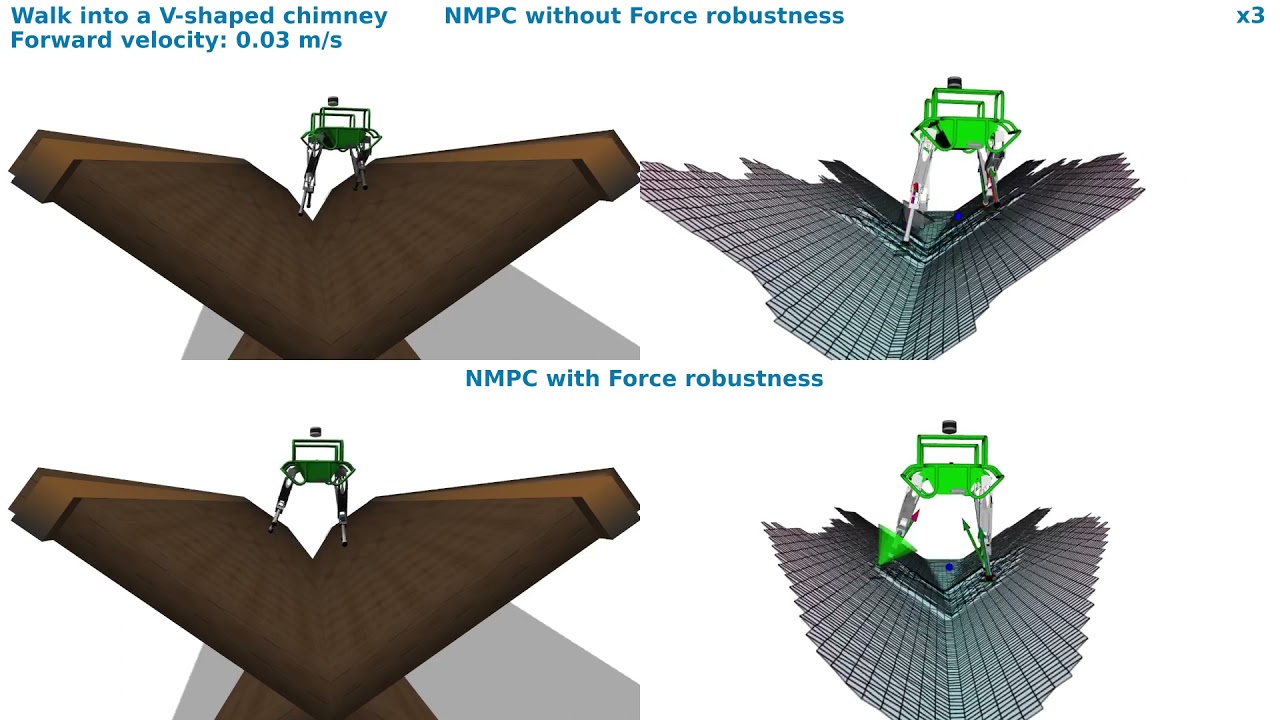
Figure 9 From Robust Convex Model Predictive Control For Quadruped Locomotion Under ... This paper presents an implementation of model predictive control (mpc) to determine ground reaction forces for a torque controlled quadruped robot, capable of robust locomotion at a variety of speeds. Higher layer, we propose a computationally tractable robust model predictive control (rmpc) framework that generates optimal reduced order traject. Nasa/ads reduced model predictive control toward highly dynamic quadruped locomotion kim, deok ha ; park, jong hyeon publication: ieee access. Abstract full dynamics model predictive control (mpc) has recently been applied to quadrupedal locomotion in semi unstructured environments. these advances have been fueled by the availability of eficient trajectory optimization (to) algorithms and inexpensive computational power. In this paper, we propose a new control scheme that can accomplish various dynamic locomotion of a quadruped robot with minimal user intervention. the effective combi nation of mpc and wbc is verified by the experimental results on the mini cheetah robot. Robust convex model predictive control for quadruped locomotion under uncertainties published in: ieee transactions on robotics ( volume: 39 , issue: 6 , december 2023 ).

Figure 4 From Reduced Model Predictive Control Toward Highly Dynamic Quadruped Locomotion ...
Figure 4 From Reduced Model Predictive Control Toward Highly Dynamic Quadruped Locomotion ... Nasa/ads reduced model predictive control toward highly dynamic quadruped locomotion kim, deok ha ; park, jong hyeon publication: ieee access. Abstract full dynamics model predictive control (mpc) has recently been applied to quadrupedal locomotion in semi unstructured environments. these advances have been fueled by the availability of eficient trajectory optimization (to) algorithms and inexpensive computational power. In this paper, we propose a new control scheme that can accomplish various dynamic locomotion of a quadruped robot with minimal user intervention. the effective combi nation of mpc and wbc is verified by the experimental results on the mini cheetah robot. Robust convex model predictive control for quadruped locomotion under uncertainties published in: ieee transactions on robotics ( volume: 39 , issue: 6 , december 2023 ).
 Time-Varying Model Predictive Control For Highly Dynamic Motions Of Quadrupedal Robots")
(PDF) Time-Varying Model Predictive Control For Highly Dynamic Motions Of Quadrupedal Robots
(PDF) Time-Varying Model Predictive Control For Highly Dynamic Motions Of Quadrupedal Robots In this paper, we propose a new control scheme that can accomplish various dynamic locomotion of a quadruped robot with minimal user intervention. the effective combi nation of mpc and wbc is verified by the experimental results on the mini cheetah robot. Robust convex model predictive control for quadruped locomotion under uncertainties published in: ieee transactions on robotics ( volume: 39 , issue: 6 , december 2023 ).

Locomotion Control For A Quadruped Robot Based On Motor Primitives Presentation | Free To Download
Locomotion Control For A Quadruped Robot Based On Motor Primitives Presentation | Free To Download
Model Predictive Control with Environment Adaptation for Legged Locomotion
Model Predictive Control with Environment Adaptation for Legged Locomotion
Related image with pdf reduced model predictive control toward highly dynamic quadruped locomotion
 Reduced Model Predictive Control Toward Highly Dynamic Quadruped Locomotion")



 Time-Varying Model Predictive Control For Highly Dynamic Motions Of Quadrupedal Robots")



 Nonlinear Model Predictive Control For Quadrupedal Locomotion Using Second-Order ...")
 Optimal Control For Quadruped Locomotion Using LTV MPC")


Related image with pdf reduced model predictive control toward highly dynamic quadruped locomotion




About "Pdf Reduced Model Predictive Control Toward Highly Dynamic Quadruped Locomotion"
Comments are closed.