Pdf The Fixed Time Observer Based Adaptive Tracking Control For Aerial Flexible Joint Robot

Adaptive Fixed-Time Fault-Tolerant Tracking Control And Its Application For Robot Manipulators ...
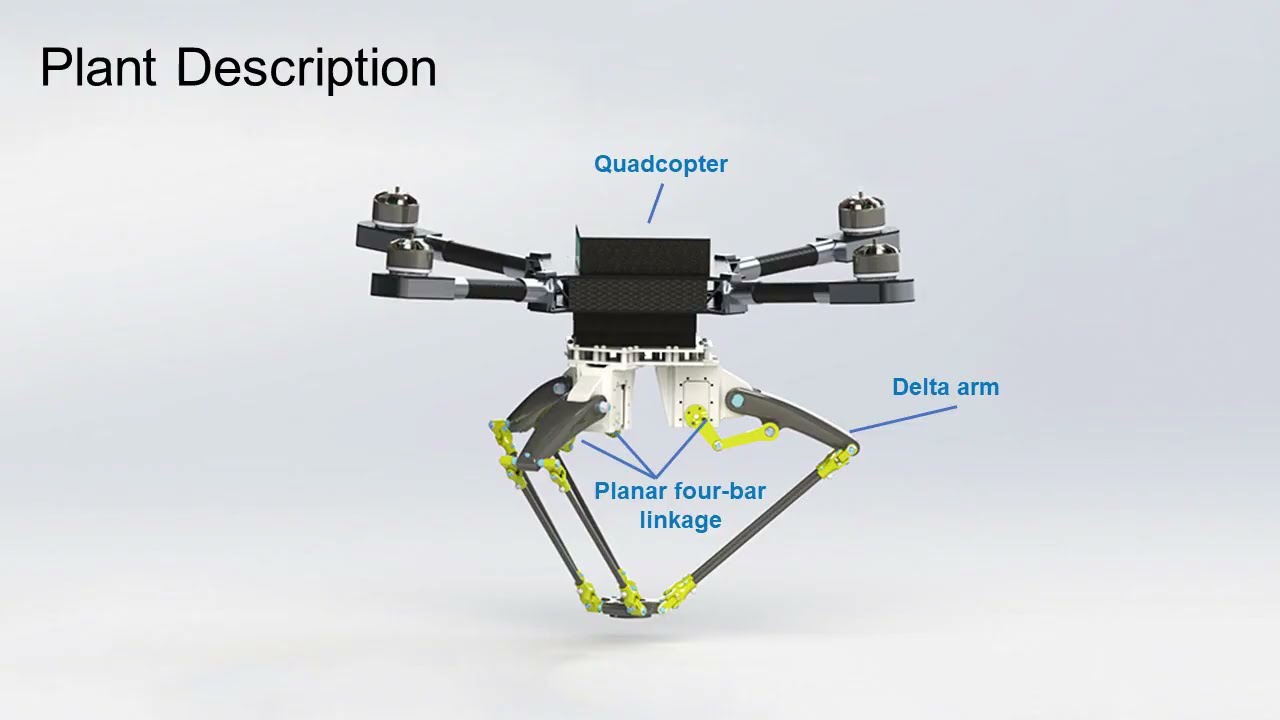
Adaptive Fixed-Time Fault-Tolerant Tracking Control And Its Application For Robot Manipulators ... To handle uncertainty, the input saturation and the output constraint existing in the system, a fixed time observer based adaptive control scheme, is proposed (ftoac). The aerial flexible joint robot (afjr) manipulation system has been widely used in recent years. to handle uncertainty, the input saturation and the output constraint existing in the system, a fixed time observer based adaptive control scheme (ftoac) is proposed.
 Robust Trajectory Tracking Control For Constrained Small Fixed-Wing Aerial Vehicles With ...")
(PDF) Robust Trajectory Tracking Control For Constrained Small Fixed-Wing Aerial Vehicles With ...
(PDF) Robust Trajectory Tracking Control For Constrained Small Fixed-Wing Aerial Vehicles With ... Together with feso and fppc, a new fixed time adaptive nonsingular fast terminal sliding mode controller (fanftsmc) is developed. meanwhile, an adaptive terminal sliding mode reaching law adopted in fanftsmc promotes the robustness and decreases the chattering phenomenon. Both theoretical analysis and experimental results demonstrate the superiority of the proposed fixed time backstepping control algorithm. this article proposes a novel adaptive disturbance observer based fixed time backstepping control algorithm for uncertain robotic systems. To achieve control objectives, the ftdo based adaptive fuzzy fixed time controller is investigated. in addition, the closed loop system is divided into position subsystem and attitude subsystem. To achieve fixed time tracking control for the aerial fjr system existing unknown continuous functions, input saturations, and out constraints, the following definitions, assumptions, and lemmas are given.

Fixed-time Disturbance Observer-based Fixed-time Prescribed Performance Control For Nonlinear ...
Fixed-time Disturbance Observer-based Fixed-time Prescribed Performance Control For Nonlinear ... To achieve control objectives, the ftdo based adaptive fuzzy fixed time controller is investigated. in addition, the closed loop system is divided into position subsystem and attitude subsystem. To achieve fixed time tracking control for the aerial fjr system existing unknown continuous functions, input saturations, and out constraints, the following definitions, assumptions, and lemmas are given. A proportional–integral–derivative (pid) based sliding mode control (smc) is proposed to handle actuator faults and unknown disturbances in combination with the fixed time observer within the fault tolerant control (ftc) design scheme. This article presents an adaptive fault tolerant control (ftc) strategy based on a fixed time fault observer for the attitude, altitude tracking, and control of quadrotor unmanned. This article investigates the antidisturbance control design for flexible air breathing hypersonic vehicles (fahvs) with appointed time prescribed tracking performances. To achieve interception of maneuvering targets with the desired impact angles, a robust fixed time guidance law is proposed based on the integral sliding mode technique and fixed time stability theory.

Finite-Time Extended State Observer-Based Fixed-Time Attitude Control For Hypersonic Vehicles
Finite-Time Extended State Observer-Based Fixed-Time Attitude Control For Hypersonic Vehicles A proportional–integral–derivative (pid) based sliding mode control (smc) is proposed to handle actuator faults and unknown disturbances in combination with the fixed time observer within the fault tolerant control (ftc) design scheme. This article presents an adaptive fault tolerant control (ftc) strategy based on a fixed time fault observer for the attitude, altitude tracking, and control of quadrotor unmanned. This article investigates the antidisturbance control design for flexible air breathing hypersonic vehicles (fahvs) with appointed time prescribed tracking performances. To achieve interception of maneuvering targets with the desired impact angles, a robust fixed time guidance law is proposed based on the integral sliding mode technique and fixed time stability theory.
 The Fixed-Time Observer-Based Adaptive Tracking Control For Aerial Flexible-Joint Robot ...")
(PDF) The Fixed-Time Observer-Based Adaptive Tracking Control For Aerial Flexible-Joint Robot ...
(PDF) The Fixed-Time Observer-Based Adaptive Tracking Control For Aerial Flexible-Joint Robot ... This article investigates the antidisturbance control design for flexible air breathing hypersonic vehicles (fahvs) with appointed time prescribed tracking performances. To achieve interception of maneuvering targets with the desired impact angles, a robust fixed time guidance law is proposed based on the integral sliding mode technique and fixed time stability theory.
 Observer-Based Robust Finite-Time Trajectory Tracking Control For A Stratospheric ...")
(PDF) Observer-Based Robust Finite-Time Trajectory Tracking Control For A Stratospheric ...
(PDF) Observer-Based Robust Finite-Time Trajectory Tracking Control For A Stratospheric ...
ESO-Based Robust and High-Precision Tracking Control for Aerial Manipulation
ESO-Based Robust and High-Precision Tracking Control for Aerial Manipulation
Related image with pdf the fixed time observer based adaptive tracking control for aerial flexible joint robot

 Robust Trajectory Tracking Control For Constrained Small Fixed-Wing Aerial Vehicles With ...")


 The Fixed-Time Observer-Based Adaptive Tracking Control For Aerial Flexible-Joint Robot ...")
 Observer-Based Robust Finite-Time Trajectory Tracking Control For A Stratospheric ...")



 The Design Of Fixed-Time Observer And Finite-Time Fault-Tolerant Control For Hypersonic ...")
 Fixed-Time Trajectory Tracking Control Of Unmanned Surface Vessels With Prescribed ...")

Related image with pdf the fixed time observer based adaptive tracking control for aerial flexible joint robot




About "Pdf The Fixed Time Observer Based Adaptive Tracking Control For Aerial Flexible Joint Robot"
Comments are closed.