
Gaussian-Process-based Robot Learning From Demonstration | DeepAI
Gaussian-Process-based Robot Learning From Demonstration | DeepAI In this paper, we present a novel approach for tracking control of robot manipulators with dynamical uncertainties. based on the gaussian process (gp), the unkn. In this paper, we propose a novel robust fl controller based on gpr, where we exploit both the learned model and the posterior variance to compensate for modeling inac curacies and guarantee tracking error rejection.
 Robust Prescribed Trajectory Tracking Control Of A Robot Manipulator Using Adaptive Finite ...")
(PDF) Robust Prescribed Trajectory Tracking Control Of A Robot Manipulator Using Adaptive Finite ...
(PDF) Robust Prescribed Trajectory Tracking Control Of A Robot Manipulator Using Adaptive Finite ... Therefore, we propose a novel computed torque control law which consists of a pd feedback and a dynamic feed forward compensation part with gaussian processes. for this purpose, the nonparametric gaussian process regression infers the difference between an estimated and the true dynamics. This paper aims to develop a novel model free controller for uncertain robot manipulators that achieves high accuracy tracking performance with adaptive feedback gains. this study uses sparse online gaussian processes (sogp) to model unknown robot dynamics and design the motion tracking controller. The contribution of this paper is a novel computed torque control law for robotic manipulators using gaussian pro cess regression, which guarantees stability and consistency of the regression. In this paper, we provide a novel, learning based control approach based on gaussian processes (gps) that ensures both stability of the closed loop system and high accuracy tracking.
 Robust Tracking Control Of Robot Manipulators Using Only Joint Position Measurements")
(PDF) Robust Tracking Control Of Robot Manipulators Using Only Joint Position Measurements
(PDF) Robust Tracking Control Of Robot Manipulators Using Only Joint Position Measurements The contribution of this paper is a novel computed torque control law for robotic manipulators using gaussian pro cess regression, which guarantees stability and consistency of the regression. In this paper, we provide a novel, learning based control approach based on gaussian processes (gps) that ensures both stability of the closed loop system and high accuracy tracking. In this paper, we present a novel approach for tracking control of robot manipulators with dynamical uncertainties. based on the gaussian process (gp), the unknown robotic dynamics are precisely modeled and estimated. A gaussian process (gp) based adaptive sliding mode control algorithm is proposed for tracking control of robotic manipulators with dynamical uncertainties. gau. In this paper, we propose a novel robust fl controller based on gpr, where we exploit both the learned model and the posterior variance to compensate for modeling inaccuracies and guarantee tracking error rejection. Abstract robotic manipulation remains one of the most difficult challenges in robotics, with approaches ranging from classical model based control to modern imitation learning. although these methods have enabled substantial progress, they often require extensive manual design, struggle with performance, and demand large scale data collection.

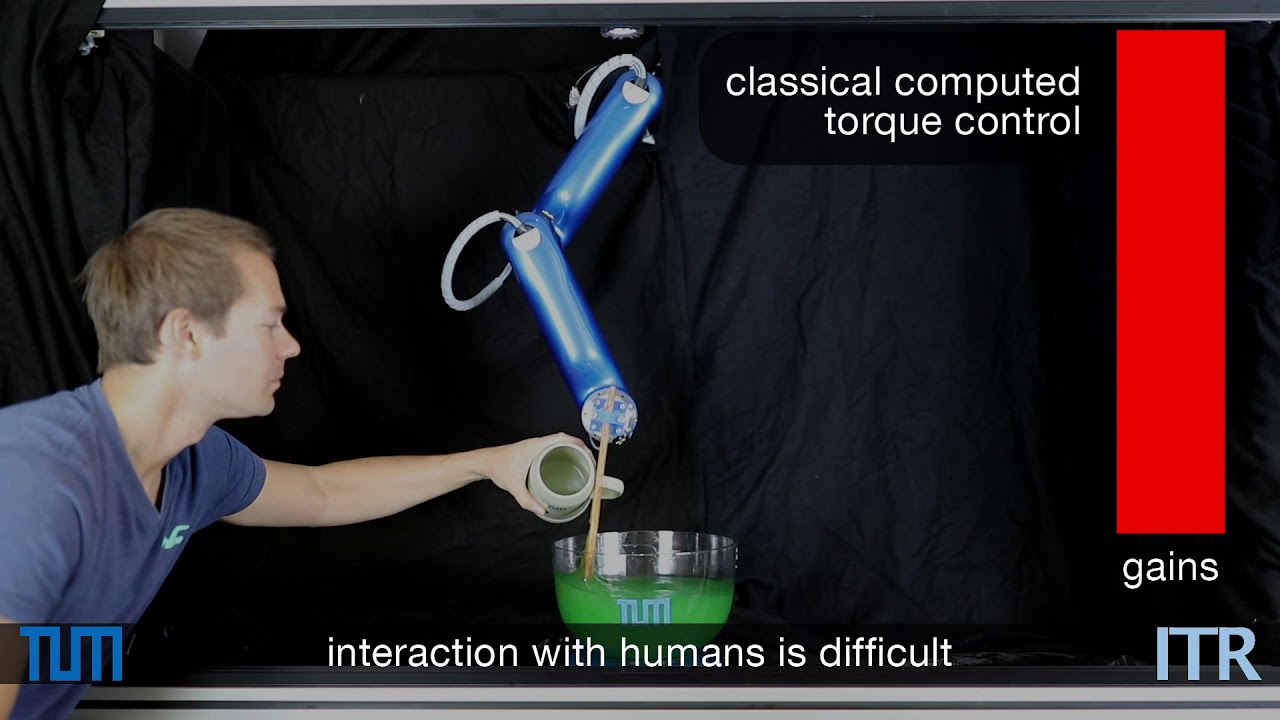
Robot Manipulator With Gaussian Process Based Tracking Control - YouTube
Robot Manipulator With Gaussian Process Based Tracking Control - YouTube In this paper, we present a novel approach for tracking control of robot manipulators with dynamical uncertainties. based on the gaussian process (gp), the unknown robotic dynamics are precisely modeled and estimated. A gaussian process (gp) based adaptive sliding mode control algorithm is proposed for tracking control of robotic manipulators with dynamical uncertainties. gau. In this paper, we propose a novel robust fl controller based on gpr, where we exploit both the learned model and the posterior variance to compensate for modeling inaccuracies and guarantee tracking error rejection. Abstract robotic manipulation remains one of the most difficult challenges in robotics, with approaches ranging from classical model based control to modern imitation learning. although these methods have enabled substantial progress, they often require extensive manual design, struggle with performance, and demand large scale data collection.
 Trajectory Tracking Control For Robot Manipulator Using Fractional-Order 𝑷𝑰𝑫Control")
(PDF) Trajectory Tracking Control For Robot Manipulator Using Fractional-Order 𝑷𝑰𝑫Control
(PDF) Trajectory Tracking Control For Robot Manipulator Using Fractional-Order 𝑷𝑰𝑫Control In this paper, we propose a novel robust fl controller based on gpr, where we exploit both the learned model and the posterior variance to compensate for modeling inaccuracies and guarantee tracking error rejection. Abstract robotic manipulation remains one of the most difficult challenges in robotics, with approaches ranging from classical model based control to modern imitation learning. although these methods have enabled substantial progress, they often require extensive manual design, struggle with performance, and demand large scale data collection.

Figure 2 From A Study On Intelligent Control Of Robot Manipulator With Eight Joints For Smart ...
Figure 2 From A Study On Intelligent Control Of Robot Manipulator With Eight Joints For Smart ...
Robot Manipulator with Gaussian Process based Tracking Control
Robot Manipulator with Gaussian Process based Tracking Control
Related image with robot manipulator with gaussian process based tracking control

 Robust Prescribed Trajectory Tracking Control Of A Robot Manipulator Using Adaptive Finite ...")
 Robust Tracking Control Of Robot Manipulators Using Only Joint Position Measurements")

 Trajectory Tracking Control For Robot Manipulator Using Fractional-Order 𝑷𝑰𝑫Control")

 A Model-Free-Based Control Method For Robot Manipulators: Achieving Prescribed Performance ...")


 Adaptive Tracking Control Of Robotic Manipulators With Unknown Kinematics And Uncertain ...")
 Arm Robot Manipulator Design And Control For Trajectory Tracking; A Review")
Related image with robot manipulator with gaussian process based tracking control




About "Robot Manipulator With Gaussian Process Based Tracking Control"
Comments are closed.