Trigonometry Calculate Three Wheeled Mobile Robot Position And Heading Mathematics Stack
 Mobile Robot Position And Heading - Mathematics Stack ...")
Trigonometry - Calculate (three Wheeled) Mobile Robot Position And Heading - Mathematics Stack ...
Trigonometry - Calculate (three Wheeled) Mobile Robot Position And Heading - Mathematics Stack ... The front wheel of the vehicle can pivot freely, but the rear wheel axis is aligned rigidly with the body axis of the moving vehicle. here is a solution to the bike problem. In summary, there are three methods discussed on how to find the forward kinematics of a robot: trigonometry, denavit hartenberg convention, and the screw theory.

1: The Three-wheeled Mobile Robot Model. | Download Scientific Diagram
1: The Three-wheeled Mobile Robot Model. | Download Scientific Diagram Questions (forward kinematics) given the wheel’s velocities or positions, what is the robot’s velocity/position ? are there any inherent system constraints?. In the simplest cases, the mapping described by equation (3.3) is sufficient to generate a for mula that captures the forward kinematics of the mobile robot: how does the robot move, given its geometry and the speeds of its wheels?. Given the control variables as a function of time, find the pose of the robot for the differential drive the control variables are often taken to be the ground velocities of the left and right wheels. Learn details about mobile robot kinematics equations including unicycle, bicycle, differential drive, and ackermann models.

Four Configurations For Three-wheeled Mobile Robot. | Download Scientific Diagram
Four Configurations For Three-wheeled Mobile Robot. | Download Scientific Diagram Given the control variables as a function of time, find the pose of the robot for the differential drive the control variables are often taken to be the ground velocities of the left and right wheels. Learn details about mobile robot kinematics equations including unicycle, bicycle, differential drive, and ackermann models. I am trying to find heading angle for my three wheeled robot my robot setup is as below i know all co ordinate values. (x1 y1) (x2 y2) two back wheels and (x3 y3) is front wheel co ordinate (xm ym. Let alpha denote the angle between the xr axis of the robots reference frame and the vector connecting the center of the axle of the wheels with the final position. The results of simulation research based on the dynamics model developed using this methodology for a three wheeled mobile robot with front wheel driven and steered were illustrated and discussed. I'm currently creating an ai for a robot whose aim is to shoot another robot. all i want to do is to be able to calculate at what angle to shoot my bullet, so that it hits my enemy, with the assumption that the enemy continues moving at the same bearing and velocity.
 In The Following | Chegg.com")
Solved Problem (Mobile Wheeled Robot) In The Following | Chegg.com
Solved Problem (Mobile Wheeled Robot) In The Following | Chegg.com I am trying to find heading angle for my three wheeled robot my robot setup is as below i know all co ordinate values. (x1 y1) (x2 y2) two back wheels and (x3 y3) is front wheel co ordinate (xm ym. Let alpha denote the angle between the xr axis of the robots reference frame and the vector connecting the center of the axle of the wheels with the final position. The results of simulation research based on the dynamics model developed using this methodology for a three wheeled mobile robot with front wheel driven and steered were illustrated and discussed. I'm currently creating an ai for a robot whose aim is to shoot another robot. all i want to do is to be able to calculate at what angle to shoot my bullet, so that it hits my enemy, with the assumption that the enemy continues moving at the same bearing and velocity.
 In The Following | Chegg.com")
Solved Problem (Mobile Wheeled Robot) In The Following | Chegg.com
Solved Problem (Mobile Wheeled Robot) In The Following | Chegg.com The results of simulation research based on the dynamics model developed using this methodology for a three wheeled mobile robot with front wheel driven and steered were illustrated and discussed. I'm currently creating an ai for a robot whose aim is to shoot another robot. all i want to do is to be able to calculate at what angle to shoot my bullet, so that it hits my enemy, with the assumption that the enemy continues moving at the same bearing and velocity.
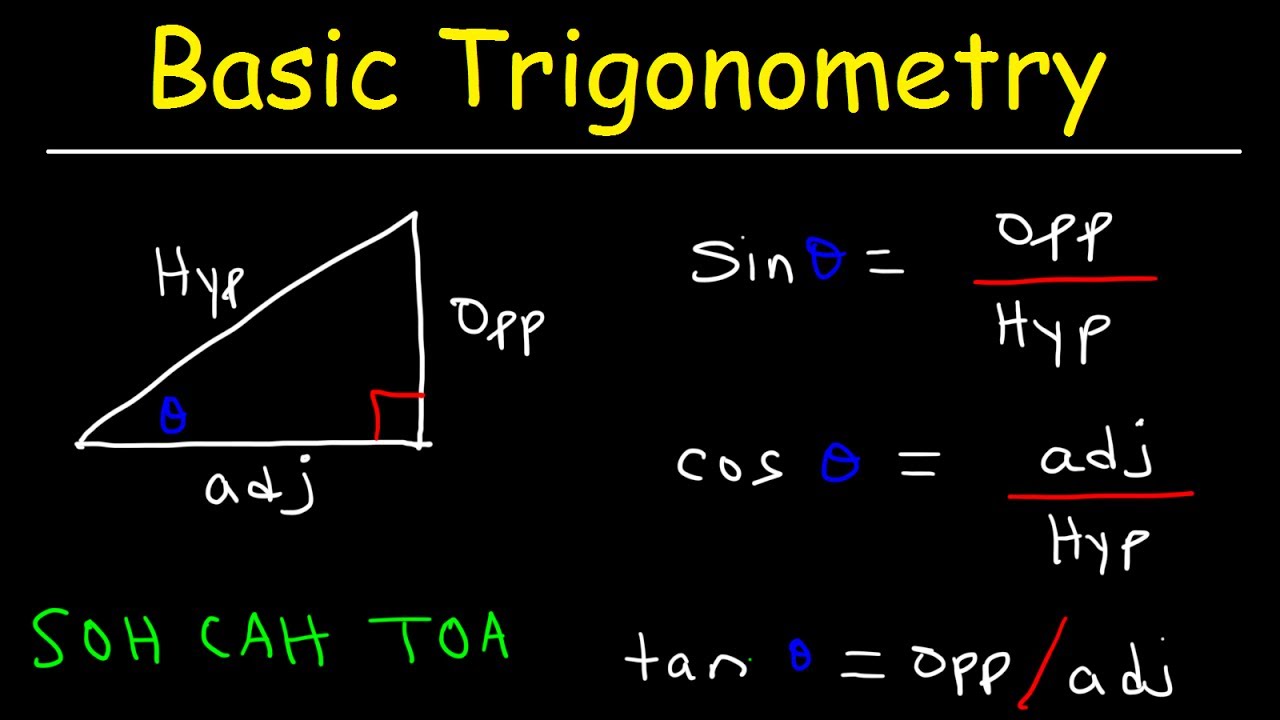
Trigonometry For Beginners!
Trigonometry For Beginners!
Related image with trigonometry calculate three wheeled mobile robot position and heading mathematics stack
 Mobile Robot Position And Heading - Mathematics Stack ...")


 In The Following | Chegg.com")
 In The Following | Chegg.com")





 | Download Scientific Diagram")

Related image with trigonometry calculate three wheeled mobile robot position and heading mathematics stack




About "Trigonometry Calculate Three Wheeled Mobile Robot Position And Heading Mathematics Stack"
Comments are closed.